
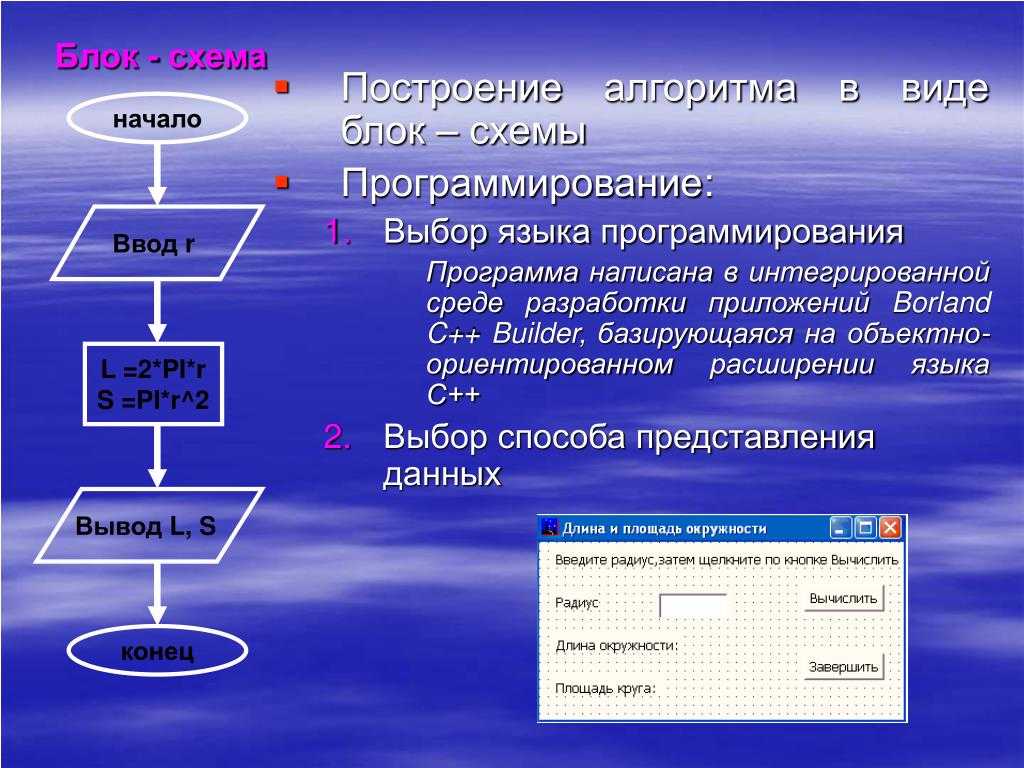
Расчеты и алгоритм прямой геодезической засечки на практике
Алгоритм прямой геодезической засечки на практике включает следующие шаги:
- Выбор начальной точки и ориентиры на местности.
- Определение геодезических координат начальной точки и ориентиров с помощью геодезических измерений или геодезических приборов (например, геодезического прибора теодолита).
- Расчет азимута между начальной точкой и ориентиром с использованием геодезических формул (например, формулы Юнга).
- Измерение расстояния между начальной точкой и ориентиром с помощью дальномера или других геодезических инструментов.
- Применение полученных данных (азимута и расстояния) для определения координат искомой точки при помощи геодезических вычислений.
Вычисления могут быть выполнены с использованием специализированного геодезического программного обеспечения или математических алгоритмов, реализованных на языке программирования.
Правильная реализация алгоритма прямой геодезической засечки на практике требует учета различных факторов, таких как геодезическая деформация, измерительные ошибки и т. д. Однако, при правильном подходе и использовании точных данных, результаты таких расчетов могут быть достаточно точными и надежными. Это позволяет использовать прямую геодезическую засечку в различных областях, таких как строительство, картография, а также для определения границ территорий и др.
Вычисление нормальных векторов для плоскостей
Нормальные векторы — это не те векторы, у которых все в порядке, или которые чувствуют себя хорошо. По определению, нормальный вектор (нормаль) к плоскости — это вектор, перпендикулярный данной плоскости.
Другими словами, нормаль — это вектор, перпендикулярный любому вектору в данной плоскости. Наверняка вы встречали такое определение — правда, вместо векторов речь шла о прямых. Однако чуть выше было показано, что в задаче C2 можно оперировать любым удобным объектом — хоть прямой, хоть вектором.
Еще раз напомню, что всякая плоскость задается в пространстве уравнением Ax + By + Cz + D = 0, где A, B, C и D — некоторые коэффициенты. Не умаляя общности решения, можно полагать D = 1, если плоскость не проходит через начало координат, или D = 0, если все-таки проходит. В любом случае, координаты нормального вектора к этой плоскости равны n = (A; B; C).
Итак, плоскость тоже можно успешно заменить вектором — той самой нормалью. Всякая плоскость задается в пространстве тремя точками. Как найти уравнение плоскости (а следовательно — и нормали), мы уже обсуждали в самом начале статьи. Однако этот процесс у многих вызывает проблемы, поэтому приведу еще парочку примеров:
Поскольку плоскость не проходит через начало координат, ее уравнение выглядит так: Ax + By + Cz + 1 = 0, т.е. коэффициент D = 1. Поскольку эта плоскость проходит через точки A1, B и C1, то координаты этих точек обращают уравнение плоскости в верное числовое равенство.
Подставим вместо x, y и z координаты точки A1 = (0; 0; 1). Имеем:
A · 0 + B · 0 + C · 1 + 1 = 0 ⇒ C + 1 = 0 ⇒ C = − 1;
Аналогично, для точек B = (1; 0; 0) и C1 = (1; 1; 1) получим уравнения:
A · 1 + B · 0 + C · 0 + 1 = 0 ⇒ A + 1 = 0 ⇒ A = − 1;
A · 1 + B · 1 + C · 1 + 1 = 0 ⇒ A + B + C + 1 = 0;
Но коэффициенты A = − 1 и C = − 1 нам уже известны, поэтому остается найти коэффициент B:
B = − 1 − A − C = − 1 + 1 + 1 = 1.
Получаем уравнение плоскости: − A + B − C + 1 = 0, Следовательно, координаты нормального вектора равны n = (− 1; 1; − 1).
В данном случае плоскость проходит через начало координат, поэтому коэффициент D = 0, а уравнение плоскости выглядит так: Ax + By + Cz = 0. Поскольку плоскость проходит через точки A1 и C, координаты этих точек обращают уравнение плоскости в верное числовое равенство.
Подставим вместо x, y и z координаты точки A1 = (0; 0; 1). Имеем:
A · 0 + B · 0 + C · 1 = 0 ⇒ C = 0;
Аналогично, для точки C = (1; 1; 0) получим уравнение:
A · 1 + B · 1 + C · 0 = 0 ⇒ A + B = 0 ⇒ A = − B;
Положим B = 1. Тогда A = − B = − 1, и уравнение всей плоскости имеет вид: − A + B = 0, Следовательно, координаты нормального вектора равны n = (− 1; 1; 0).
Вообще говоря, в приведенных задачах надо составлять систему уравнений и решать ее. Получится три уравнения и три переменных, но во втором случае одна из них будет свободной, т.е. принимать произвольные значения. Именно поэтому мы вправе положить B = 1 — без ущерба для общности решения и правильности ответа.
Определение координат середины отрезка
Пусть построен вектор АВ, причем известны коор-ты его начала А (хА; уА) и его конца B (хB; уB). Обозначим буквой С середину отрезка АВ и попытаемся вычислить коор-ты С, которые мы обозначим как (хC; уC):
![]()
Рассмотрим вектора АС и СВ. Они имеют одинаковую длину, потому что С разбивает АВ пополам. Также АС и СВ коллинеарны, так как они лежат на одной прямой АВ. При этом они и сонаправлены, а значит, эти вектора равны:
![]()
Нам удалось выразить коор-ты С через координаты А и В. В итоге можно сформулировать правило:
![]()
Например, пусть необходимо найти координаты середины отрезка HK, при этом известны коор-ты его концов: Н(5; – 2) и К(3; 4). Сначала найдем полусумму коор-т х и получим эту же коор-ту у середины:
![]()
Итак, точка середины отрезка имеет коор-ты (4; 1). Для наглядности построим отрезок ОК и продемонстрируем, что его середина действительно находится в точке (4; 1):
![]()
Уравнивание при помощи параметрического способа
Под определение обратной многократной угловой засечки попадает как совокупность простых однократных измерений, так и просто большое количество избыточных. Однако в обоих случаях необходимо уравнивание, которое выполняется по измеренным углам и направлениям.
К примеру, неизвестные (x_
) и (y_
) – координаты точки Р, которые в данном способе будут представлены в качестве параметров. Для этого их представляют в виде приближенных значений (x_<0>), (y_<0>) и поправок к ним (δх) и (δу).
В приведенном уравнении (x_<0>) и (y_<0>) – результаты обработки однократных засечек, а (δх) и (δу) получают через уравнивание методом наименьших квадратов параметрическим способом с применением дифференциальных формул.
![]()
Этот метод подразумевает применение не только параметрического, но и коррелатного способа. Они дают одинаковые результаты, но отличаются по объему вычислений.
Однако в геодезической практике целесообразнее применять параметрический способ, поскольку при любом количестве избыточных измерений число нормальных уравнений будет аналогично числу неизвестных. При этом каждое неизвестное будет представлено в виде суммы приближенного значения и его поправки.
/>
Эта статья о том как производить вычисления в программе MathCad. Производить расчеты MathCad можно как простых уравнений так и сложных. Перечислять все функции данной программы я не вижу смысла, начнем по порядку.
Первое открытие MathCad
Так выглядит окно MathCad. Перед началом работы вытащим те инструменты которые нам понадобятся, для этого открываем меню Вид переходим на строку панели инструментов и выбираем нужные нам инструменты. Для начала нам понадобится инструмент калькулятор и греческая
Выглядят они вот так:
Ввод данных и расчеты MathCad
Для удобства советую сначала записывать наши данные как определение каких либо знаков, а затем записывать формулы. Это даст возможность при изменении каких либо начальных данных не переписывать все решение, а лишь изменить его определение. Примером будем рассматривать задачу по физике из школьного учебника.
Нам дано: U=220 В, Р=150 Вт, t°1=25°C, t°2=2500°C, α=5,1×10 -3 град -1 Найти нужно — R1
Для начала занесем начальные данные в MathCad. MathCad различает строчные и заглавные буквы латинского алфавита. Для определения значения Р используем знак определение :
Для написания нижнего индекса используем точку (.)
Для записи α нажимаем соответствующий значок на панели греческая
Для записи степени используем возвести в степень
Для удобства и понятности использования документа можно подписать каждое определение. Для этого ставим курсор в нужном месте, НЕ ПРОДОЛЖАЯ НАДПИСЬ ОПРЕДЕЛЕНИЯ А ОТДЕЛЬНОЙ ЗАПИСЬЮ, пишем то что необходимо на нужной нам раскладке.




Не буду вдаваться в подробности выведений формул, запишем сразу формулу для решения. Нам необходимо записать такую формулу:
Для удобства записи можно вставить формулу в MathCad документ как рисунок с помощью команд контекстного меню копировать/вставить (для того чтобы вставить рисунок в документ MathCad нажимаем ПКМ (правую клавишу мыши) на нужном нам изображении выбираем копировать переходим в документ MathCad на нужном месте нажимаем ПКМ и в контекстном меню выбираем команду вставить)
Записывать нужно в следующем порядке:
- сначала записываем определение
- ставим знак умножения (*) на цифровой клавиатуре или на панели калькулятор.
- в обоих множителях ставим знак деления
- далее в первой дроби записываем квадрат, а во второй сложение и умножение как в нашей формуле
5. теперь необходимо записать все определители в нашу заготовку для формулы ИМЕННО В ТОМ ВИДЕ В КАКОМ ОНИ У НАС ЗАПИСАНЫ В ОПРЕДЕЛЕНИИ
- и в завершении расчетов нам необходимо рассчитать результат, это можно сделать двумя способами: 1 снова записать определитель R1 и поставить знак (=) вычислить численно;2 поставить этот же знак в конце формулы (как я и сделал).
Теперь меняя начальные данные автоматически будет просчитываться и ответ. Этот урок направлен на первоначальное ознакомление с расчетами в программе MathCad для более углубленного изучения данной программы советую почитать следующие статьи:
Вычисление координат векторов
А что, если в задаче нет векторов — есть только точки, лежащие на прямых, и требуется вычислить угол между этими прямыми? Все просто: зная координаты точек — начала и конца вектора — можно вычислить координаты самого вектора.
Эта теорема одинаково работает и на плоскости, и в пространстве. Выражение «вычесть координаты» означает, что из координаты x одной точки вычитается координата x другой, затем то же самое надо сделать с координатами y и z. Вот несколько примеров:
Рассмотрим вектор AB: его начало находится в точке A, а конец — в точке B. Следовательно, чтобы найти его координаты, надо из координат точки B вычесть координаты точки A:
AB = (3 − 1; − 1 − 6; 7 − 3) = (2; − 7; 4).
Аналогично, начало вектора AC — все та же точка A, зато конец — точка C. Поэтому имеем:
AC = (− 4 − 1; 3 − 6; − 2 − 3) = (− 5; − 3; − 5).
Наконец, чтобы найти координаты вектора BC, надо из координат точки C вычесть координаты точки B:
BC = (− 4 − 3; 3 − (− 1); − 2 − 7) = (− 7; 4; − 9).
Ответ: AB = (2; − 7; 4); AC = (− 5; − 3; − 5); BC = (− 7; 4; − 9)
Обратите внимание на вычисление координат последнего вектора BC: очень многие ошибаются, когда работают с отрицательными числами. Это касается переменной y: у точки B координата y = − 1, а у точки C y = 3
Получаем именно 3 − (− 1) = 4, а не 3 − 1, как многие считают. Не допускайте таких глупых ошибок!
Вычисление направляющих векторов для прямых
Если вы внимательно прочитаете задачу C2, то с удивлением обнаружите, что никаких векторов там нет. Там только прямые да плоскости.
Для начала разберемся с прямыми. Здесь все просто: на любой прямой найдутся хотя бы две различные точки и, наоборот, любые две различные точки задают единственную прямую…
Кто-нибудь понял, что написано в предыдущем абзаце? Я и сам не понял, поэтому объясню проще: в задаче C2 прямые всегда задаются парой точек. Если ввести систему координат и рассмотреть вектор с началом и концом в этих точках, получим так называемый направляющий вектор для прямой:
Зачем нужен этот вектор? Дело в том, что угол между двумя прямыми — это угол между их направляющими векторами. Таким образом, мы переходим от непонятных прямых к конкретным векторам, координаты которых легко считаются. Насколько легко? Взгляните на примеры:
Поскольку длина ребер куба в условии не указана, положим AB = 1. Введем систему координат с началом в точке A и осями x, y, z, направленными вдоль прямых AB, AD и AA1 соответственно. Единичный отрезок равен AB = 1.
Теперь найдем координаты направляющего вектора для прямой AC. Нам потребуются две точки: A = (0; 0; 0) и C = (1; 1; 0). Отсюда получаем координаты вектора AC = (1 − 0; 1 − 0; 0 − 0) = (1; 1; 0) — это и есть направляющий вектор.
Теперь разберемся с прямой BD1. На ней также есть две точки: B = (1; 0; 0) и D1 = (0; 1; 1). Получаем направляющий вектор BD1 = (0 − 1; 1 − 0; 1 − 0) = (− 1; 1; 1).
Ответ: AC = (1; 1; 0); BD1 = (− 1; 1; 1)
Введем систему координат: начало в точке A, ось x совпадает с AB, ось z совпадает с AA1, ось y образует с осью x плоскость OXY, которая совпадает с плоскостью ABC.
Для начала разберемся с прямой AB1. Тут все просто: у нас есть точки A = (0; 0; 0) и B1 = (1; 0; 1). Получаем направляющий вектор AB1 = (1 − 0; 0 − 0; 1 − 0) = (1; 0; 1).
Теперь найдем направляющий вектор для AC1. Все то же самое — единственное отличие в том, что у точки C1 иррациональные координаты. Итак, A = (0; 0; 0), поэтому имеем:
![]()
Ответ: AB1 = (1; 0; 1);
Небольшое, но очень важное замечание насчет последнего примера. Если начало вектора совпадает с началом координат, вычисления резко упрощаются: координаты вектора просто равны координатам конца
К сожалению, это верно лишь для векторов. Например, при работе с плоскостями присутствие на них начала координат только усложняет выкладки.
Виды засечек
В зависимости от местности и способов построения сетей сгущения в геодезии существует два основных вида привязки к опорным пунктам:
- Непосредственная. Подразумевает привязку теодолитного или полигонометрического хода к триангуляционным пунктам высшего класса с возможностью выполнить измерения примычных углов. Используется в тех случаях, когда на опорных точках можно выполнить те же измерения, что и на соседних.
- Косвенная. Проводится только при отсутствии возможности провести непосредственные измерения примычных длин и углов. К этому виду привязки и относится засечка.
По способу же построения геодезическая засечка бывает:
- линейной (полярные и биполярные по числу пунктов);
- угловой (прямая и обратная);
- комбинированной (положение точки определяют по известным углам и линейным расстояниям).
В геодезии чаще всего прибегают к комбинированию прямой и обратной засечек. Кроме того, чтобы полученные результаты были наиболее достоверными, измеряют больше величин, чем нужно, а само местоположение искомых пунктов получают посредством уравнивания.
Как в mathcad задать градусы
Исходя из того, что координаты двух точек даны, задают их значения. Углы в1 и в2 обозначают как b1 и b2 соответственно. Нахождение углов в градусах и их последующий перевод в радианы проводят так же, как в Microsoft Excel. Дальше считают значения xp и yp по формулам (1, 2). Результат вычислений приведен на рис. 1.3.
Рис. 1.3. Расчет прямой угловой засечки по формулам Юнга в MathCAD
Таким образом, была решена прямая угловая засечка по формулам Юнга в MathCAD. Получены следующие ответы: координаты точки P xP=55,451, yP=45,233. Данные значения совпадают со значениями, полученными в пункте 1.2.
Решение с помощью системы для математических расчетов MATLAB
Для очистки экрана используют оператор clc. Затем задают значения координат точки 1 с помощью конструкций: x1=input(`x1->’); y1=input(`y1->’);. Аналогично для координат точки 2. Углы в1 и в2 обозначают как b1 и b2 соответственно. Их значения вводят с помощью оператора input отдельно для градусов, минут и секунд. Нахождение углов в градусах и их последующий перевод в радианы проводят так же, как в Microsoft Excel и MathCAD. Число р в MATLAB записывают как pi. Для введения функции котангенса углов в формулах координат используют cot(b1) и cot(b2). Дальше считают значения xp и yp по формулам (1, 2). Для вывода значений xp и yp записывают в конце всего решения . Результат вычислений приведен на рис. 1.4.
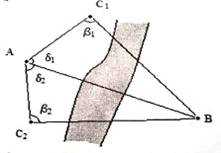
Рис. 1.4. Расчет прямой угловой засечки по формулам Юнга в MATLAB
Таким образом, была решена прямая угловая засечка по формулам Юнга в MATLAB. Получены следующие ответы: координаты точки P xP=55,4511, yP=45,2334. Данные значения совпадают со значениями, полученными в пунктах 1.2 и 1.3.
Решение с помощью системы Visual Basic for Applications
В окне формы создают ячейки для ввода значений x1, y1, x2, y2, в1 и в2 (для углов записывают отдельно градусы, минуты и секунды). Углы в1 и в2 обозначают как b1 и b2 соответственно. Далее создают кнопку «Расчет», которую необходимо запрограммировать. Также создают ячейки для вывода вычисленных координат точки P. Форма и результат вычислений изображены на рис. 1.5. Затем составляют программу для кнопки «Расчет». В VBA нет функции котангенс, поэтому её задают как ctg = Cos(x)/Sin(x). Для ввода координат первой вершины используют конструкцию: X1=Val(TextBox1.Text): Y1=Val(TextBox2.Text). Аналогично для второй вершины. Нахождение углов в градусах и их последующий перевод в радианы проводят так же, как в Microsoft Excel, MathCAD и MATLAB. Число р записывают как Pi=3.1415926. Дальше считают значения xp и yp по формулам (1, 2). Для вывода значения xр используют оператор TextBox11.Text=»xp advconts adv2″>
Рис. 1.5. Форма для расчета прямой угловой засечки по формулам Юнга в Visual Basic for Applications
Рис. 1.6. Программа для расчета прямой угловой засечки по формулам Юнга в Visual Basic for Applications
Таким образом, была решена прямая угловая засечка по формулам Юнга в системе Visual Basic for Applications. Получены следующие ответы: координаты точки P xP=55,4511, yP=45,2334. Данные значения совпадают со значениями, полученными в пунктах 1.2, 1.3 и 1.4.Значит, для расчета прямой угловой засечки по формулам Юнга подходят все использованные программы.
Однократная и многократная засечка
Если для определения координат берется только один исходный пункт, то такая засечка будет называться однократной, а если более трех – многократной.
В основе обратной однократной угловой засечки лежит так называемая задача Потенота, которая была названа в честь французского математика Лорана Потенота, удачно решившего ее еще в 1692 году. Ученый предложил по известным значениям трех близлежащих точек вычислять координаты искомой.
На сегодняшний день существует уже более ста вариаций ее решения, которые были предложены многими именитыми учеными, но в геодезической практике наибольшую популярность получили формулы Жана Деламбра, Кнейссля и Гаусса.
![]()
Рисунок 1. Обратная многократная засечка
Если же искомая точка попадает в пределы окружности, проходящей через эти точки, она становится неопределяемой. Этот ключевой недостаток в задаче Потенота, именуемый опасным кругом, приводит к необходимости определения дополнительной точки.
Обратная многократная угловая засечка как раз и подразумевает определение местоположения пункта через измерения на этом самом пункте углов или направлений как минимум на четыре твердых пункта, чьи координаты установлены. Этот метод более трудоемкий, но гарантирует надежный контроль результатов измерений. При обработке данных используют метод Гаусса-Ньютона, который в геодезии также называют параметрическим.
Обратная угловая засечка в геодезических измерениях
Засечкой называют относительно простой метод вычисления координат некоторой точки посредством измерения на ней углов и расстояний по направлению на уже закрепленные на местности контуры.
К ней достаточно часто прибегают в различных геологических, строительных и инженерных работах за счет ее простоты и экономичности. На практике обратная засечка чаще всего используются для вычисления координат пунктов геодезической сети, выноса в натуру проектных точек и т.д.
Опытный геодезист сможет без труда провести нужные измерения при помощи теодолита, тахеометра или любого другого прибора всего за пару минут.
Прямая угловая засечка
Прямая угловая засечка используется когда на местности неудобно или невозможно измерить длины сторон, или когда дополнительная точка находится на значительном расстоянии от исходных пунктов.
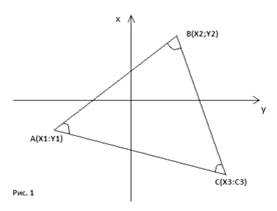
Прямая угловая геодезическая засечка заключается в том, что по известным координатам двух точек (например точек А и В) и измеренных при них углов α и β вычисляют координаты третьей точки N.
Решение прямой угловой засечки проще всего выполнить по формулам Юнга:
Вычисления удобно выполнять в таблице:
Для контроля правильности решения прямой угловой засечки по координатам точки B и полученным координатам точки N вычисляют координаты точки A, которые должны быть равны исходным координатам:
Пример решения прямой угловой засечки
Дано:
Найти:
1) вычисляют угол γ:
2) в таблицу записывают значения углов α, β и γ и координаты точек A и B;
3) вычисляют котангенсы углов α, β и γ и переносят их в таблицу:
Таблица решения прямой угловой засечки
4) по приведенным формулам вычисляют координаты точки N:
5) выполняют контроль правильности решения прямой угловой засечки, вычисляя координаты точки A, которые должны быть равны исходным координатам:
Таким образом мы получили координаты точки A, которые равны заданным, следовательно решение правильное.
Длины сторон A-B, B-N и A-N можно получить по координатам точек A, B, N решая обратную геодезическую задачу.
Для надежного контроля определения координат третьего пункта, на практике используют многократную прямую угловую засечку с трех и более исходных пунктов.
Прямую угловую засечку также можно решать по формулам Гаусса (по дирекционным углам направлений).
Источник
Тахеометрический ход. Полевые работы.
Тахеометрическим ходом называют построенную на местности разомкнутую или замкнутую ломаную линию, в которой измерены все стороны, горизонтальные углы между ними и вертикальные углы с каждой точки хода на смежные с ней точки.
Приборы, принадлежности и пособия: тахеометр со штативом; две рейки, рулетка, клья для обозначения вершин хода, топор, зонт топографический, логарифмическая линейка, тахеометрические таблицы, журнал тахеометрического хода, ручка для ведения журнала.
При проложении тахеометрического хода с измерением длин сторон дальномерами двойного изображения ещё необходимо иметь дальномер двойного изображения с комплектом реек и журнал измерения длин линий дальномерной насадкой.
Последовательность проложения хода:
-
составление проекта тахеометрического хода;
-
рекогносцировка и закрепление пунктов тахеометрического хода;
-
производство угловых и линейных измерений.
1. Составление проекта тахеометрического хода.


Проект составляется по тем же правилам, что и для теодолитного хода с соблюдением технических требований приведенных в таблице 40 практикума(стр.214).
Длина тахеометрического хода между твердыми пунктами не должна превышать велечины, вычисляемой по формуле
![]()
2. Рекогносцировка и закрепление пунктов тахеометрического хода.
На местности рекогносцировка и закрепление пунктов выполняется по тем же правилам, что для теодолитных ходов.
3. Производство угловых и линейных измерений.
Угловые и линейные измерения на каждом пункте тахеометрического хода выполняются в последовательности:
-
устанавливают теодолит(а может тахеометр?оО), т.е. центрируют(с линейной ошибкой, не большей 1 см) и горизонтируют его;
-
измеряют рулеткой(или рейкой) высоту прибора от оси вращения трубы до торца кола с точностью до 1 см
-
устанавливают рейки на соседних пунктах хода так, чтобы ось рейки проходила через центр пункта и занимала вертикальное положение;
-
устанавливают отсчет по горизонтальному, кругу близкий к 0о, и вращением лимба наводят трубу на рейку, установленную на предыдущем пункте хода (заднюю), закрепляют лимб и производят дальномерный отсчет, при этом удобно нижнюю дальномерную нить наводить на целое число делений рейки;
-
совмещают вертикальную нить сетки с асью рейки (при наведении на возможно более низкую часть рейки), а горизонтальную (среднюю) нить сетки наводят на отсчет, равный принятой высоте визирования ( либо высоте прибора, либо 2,0м, либо на верх рейки);
-
приводят пузырек уровня алидады вертикального круга в нуль-пункт;
-
производят отсчеты по горизонтальному и вертикальному кругам;
-
наводят трубу вращением алидады на рейку, установленную на последующем пункте хода(переднюю) закрепляют алидаду и производят дальномерный отсчет;
-
совмещают вертикальную нить с осью рейки при наведении на возможно более низкую часть рейки, а среднюю горизонтальную нить наводят на отсчет, равный принятой высоте визирования;
-
приводят пузырек уровня алидады вертикального круга в нуль-пункт;
-
производят отсчеты по горизонтальному и вертикальному кругам.