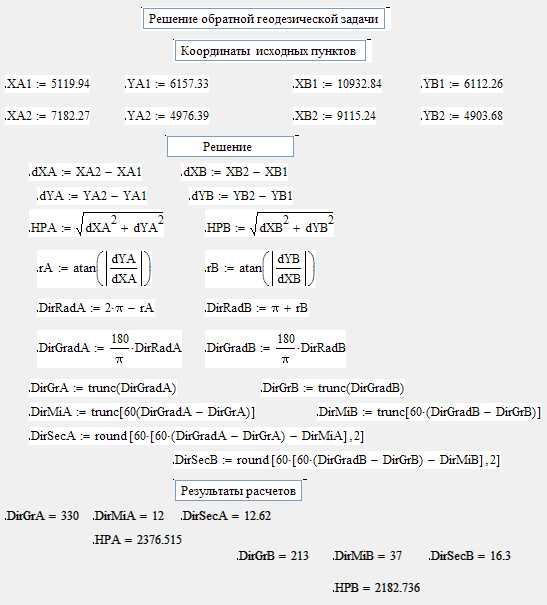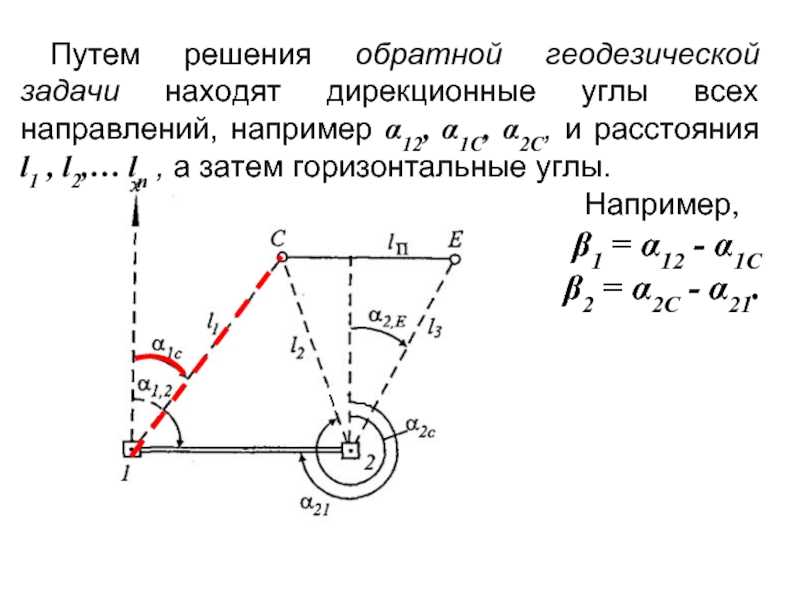
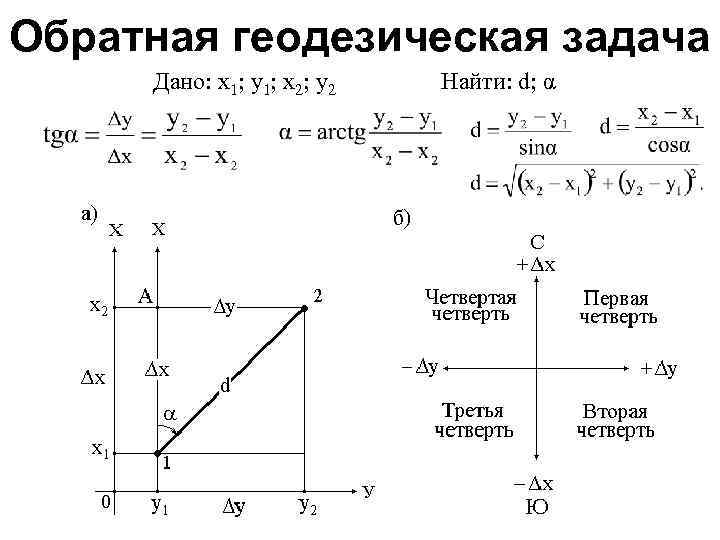
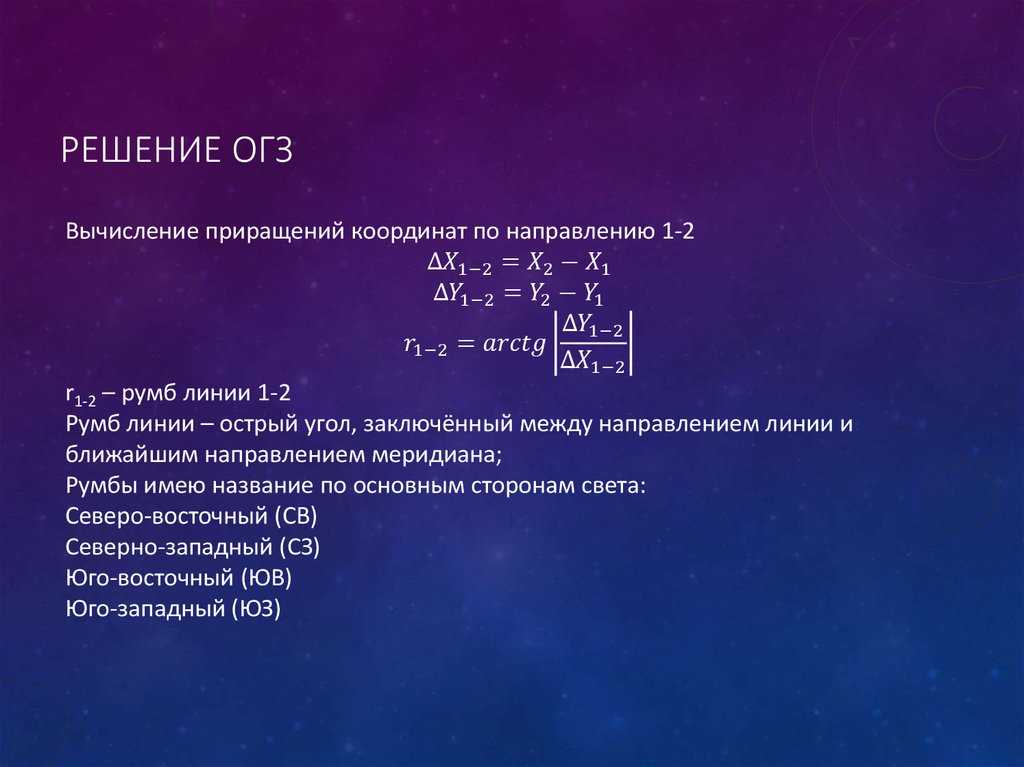
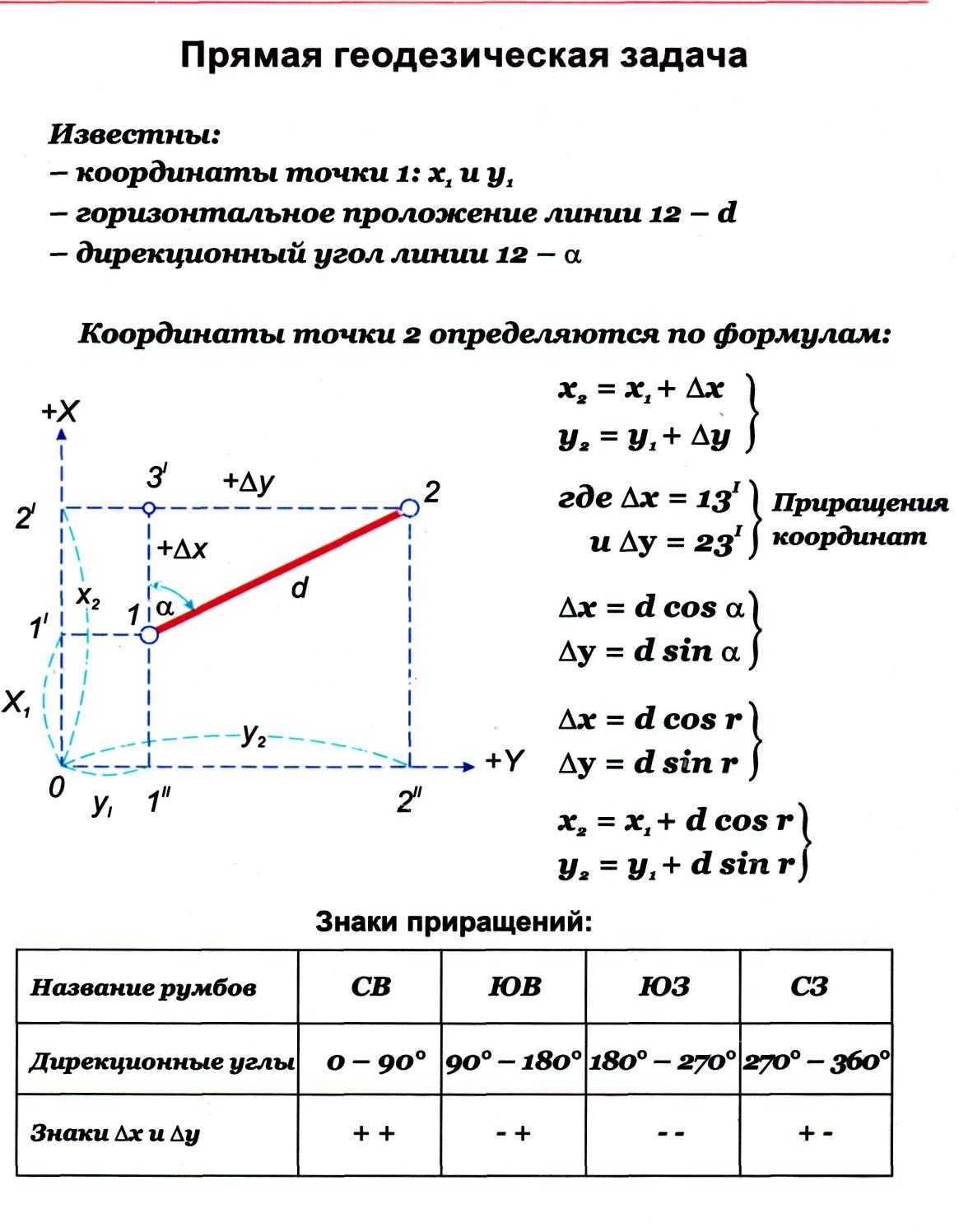
Решение обратной геодезической задачи
Основой решения является расчетная схема рис.1.5.
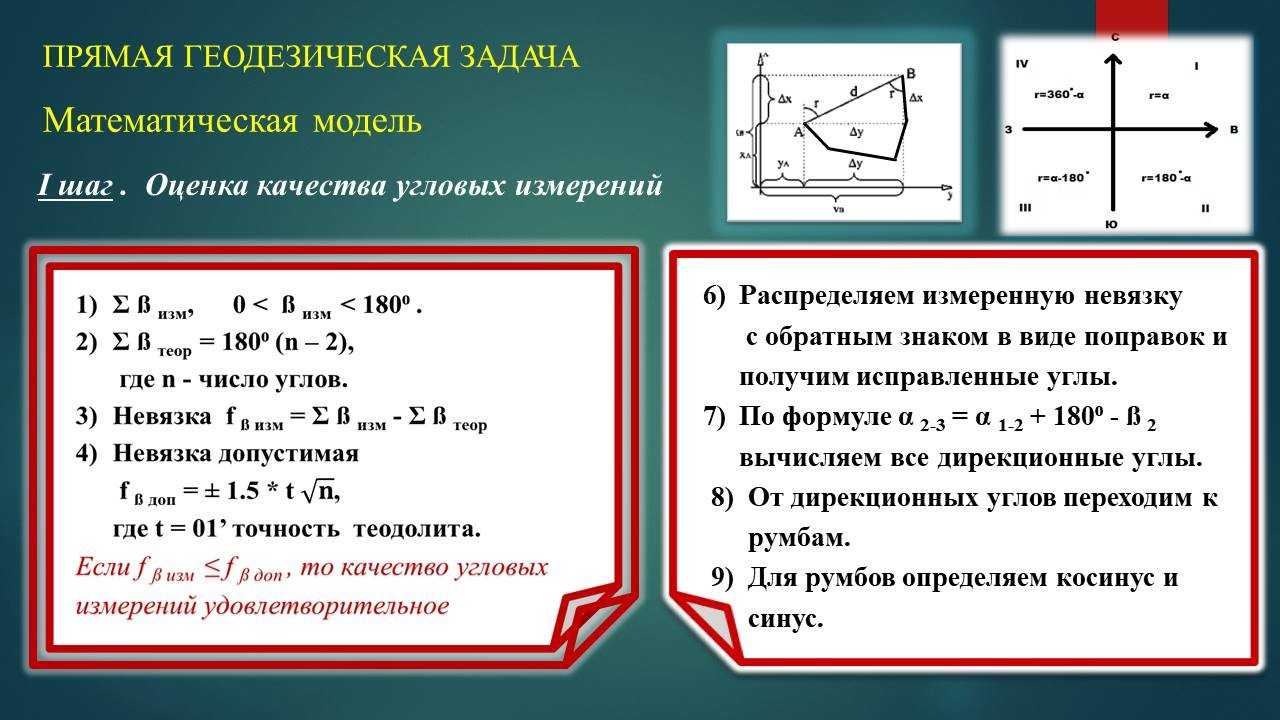
1. Выписать исходную информацию (расчетная схема соответствует рис.1.10).
2. Вычислить приращения координат по формулам (1.6).
3. На микрокалькуляторе вычислить румб и длину линии по формулам (1.7)-(1.8).
4. По знакам приращений определить название румба в соответствии с рис.1.6.
5. От румба перейти к дирекционному углу по формулам связи (рис.1.4).
6. Сравнить вычисленные значения с измеренными. Расхождения не должны превышать 2 мм в длине линии и 1 0 в дирекционном угле.
Задача решается на микрокалькуляторе. Но при этом непосредственно определить угол по формуле:=arc tg(у/х), вытекающей из уравнений (1.4), невозможно из-за неоднозначного решения задачи. Так прих отрицательном,у положительном их положительном,у отрицательном получим одинаковые значения. Для контроля вычисления можно выполнить через радианы. Связь между градусами и радианами:
r рад =r 0 / 57.29578 ;r 0 =r рад 57.29578. (1.10)
2. Приращения координат: x=XB -XA=6064410 — 6065675 = -1265 м,y=УВ— УА= -188318–(- 188030) = — 288 м.
3. Румб линии через градусы, установив программу DEG:
/r/ = arc tg ( Δу / Δх )=”288” : ” 1265” = ”2ndF» tg -1 ” = 12.826 0 = 12 0 50′ .
Длина линии (программа DEG):
d=x/Cosr=“12.826“Cos”2ndF“1/x”×”1265”=1297 м. Второе вычисление:d=y/Sinr=“12.826“Sin”2ndF“1/x”×”288” = 1297 м. Расхождений в вычислениях не должно быть.
4. В соответствии со знаками приращений румб r = ЮЗ:12 0 50′.
5. Дирекционный угол = 192 0 50′.
6. Расхождение в длине линии 3 м, в румбе 10′. Расхождения допустимы.
Пример вычисления румба через радианы. Программа RAD:
arctg(Δу/Δх )=”288”:”1265“=“2ndF»tg -1 ”=»×»57.2958″=12.826 0 =12 0 50′.
Вычисления следует выполнять по разным формулам. Так, решение прямой задачи выполняется через дирекционные углы по формулам (1.4) и через румбы по формулам (1.5), кроме первой четверти. В северо-восточной части r= , контроля не будет. В этом случае, как и при решении обратной задачи, вычисления следует вести через градусы и через радианы.
Дирекционные углы и румбы
Дирекционные углы и румбы используются для ориентирования линий.
![]()
![]()
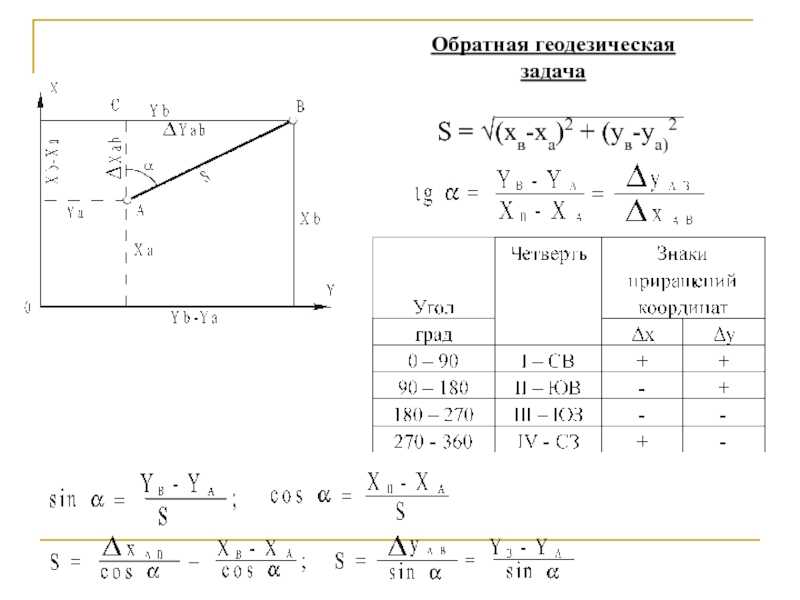
Связь между дирекционными углами и румбами зависит от четверти, в которой находится заданное направление. Перевод дирекционных углов в румбы выполняется согласно таблице ниже.
![]()
Пример перевода дирекционных углов в румбы
- если дирекционный угол α равен 42°15′55″, тогда согласно таблице румб вычисляется по формуле r=α=42°15′55″, а название румба будет СВ;
- если дирекционный угол α равен 100°45′11″, тогда согласно таблице румб вычисляется по формуле r=180°-α=180°-100°45′11″=79°14′49″, а название румба будет ЮВ;
- если дирекционный угол α равен 210°17′42″, тогда согласно таблице румб вычисляется по формуле r=α-180°=210°17′42″-180°=30°17′42″, а название румба будет ЮЗ;
- если дирекционный угол α равен 335°28′32″, тогда согласно таблице румб вычисляется по формуле r=360°-α=360°-335°28′32″=24°31′28″, а название румба будет СЗ.
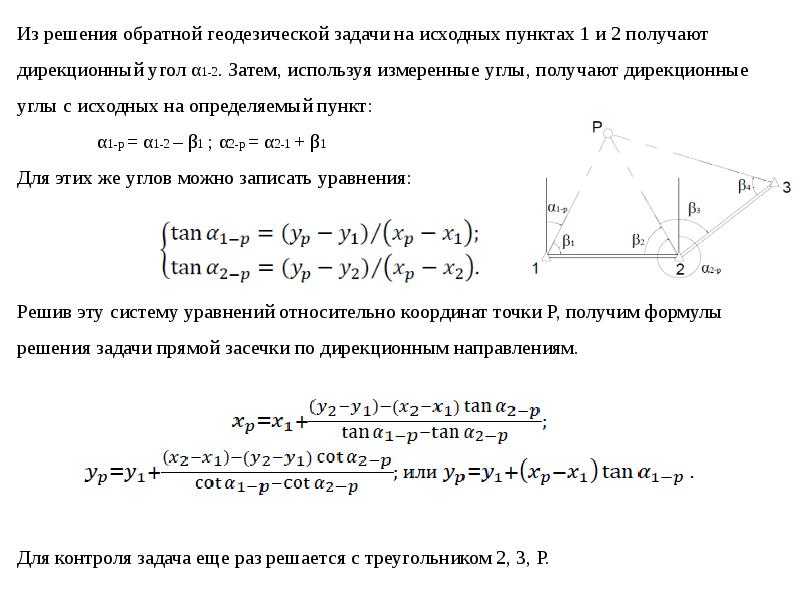
Однократная и многократная засечка
Если для определения координат берется только один исходный пункт, то такая засечка будет называться однократной, а если более трех – многократной.
В основе обратной однократной угловой засечки лежит так называемая задача Потенота, которая была названа в честь французского математика Лорана Потенота, удачно решившего ее еще в 1692 году. Ученый предложил по известным значениям трех близлежащих точек вычислять координаты искомой.
На сегодняшний день существует уже более ста вариаций ее решения, которые были предложены многими именитыми учеными, но в геодезической практике наибольшую популярность получили формулы Жана Деламбра, Кнейссля и Гаусса.
![]()
Рисунок 1. Обратная многократная засечка
Если же искомая точка попадает в пределы окружности, проходящей через эти точки, она становится неопределяемой. Этот ключевой недостаток в задаче Потенота, именуемый опасным кругом, приводит к необходимости определения дополнительной точки.
Обратная многократная угловая засечка как раз и подразумевает определение местоположения пункта через измерения на этом самом пункте углов или направлений как минимум на четыре твердых пункта, чьи координаты установлены. Этот метод более трудоемкий, но гарантирует надежный контроль результатов измерений. При обработке данных используют метод Гаусса-Ньютона, который в геодезии также называют параметрическим.
Нанесение точек на план и его оформление
После завершения обработки измерений, которые были проведены на местности, составляется ее контурный или ситуационный план. Построение плана теодолитного хода происходит поэтапно и состоит из следующих этапов:
- Создание координатной сетки. Ход необходимо равномерно отобразить на плане, поэтому сначала определяют середину листа. Через весь лист проводят два диагональных отрезка, от которых и будет строиться сетка, состоящая из отрезков по 10 см. Допускается погрешность не более 0,2 мм. Определить их количество можно по формуле:
\(N_{X}=(x_{max}-x_{min})/200\)
\(N_{Y}=(y_{max}-y_{min})/200\)
\(x_{max},y_{max}\) – наибольшие значения координат, увеличенные до большего значения, которое кратное 200.
\(x_{min},y_{min}\) – наименьшее значение, но уменьшенное и кратное 200.
200 – длина стороны квадрата в метрах , которая в плане равна 10 см.
- Обозначение точек на плане. Лучше всего подходят для нанесения координат пунктов на план циркуль и масштабная линейка. Соседние вершины должны иметь такое же расстояние и дирекционный угол, как записано в ведомости.
- Нанесение ситуации на план. Участки снимаемой местности в процессе полевых работ отображают на специальном схематическом бланке – абрисе. В дальнейшем их используют для переноса контуров, линий и вершин точек. Ситуация изображается на планах и картах специальными обозначениями – условными знаками.
- Оформление плана в соответствии с требованиями. Все топографические материалы должны строго соответствовать нормативным документам. В частности, нужно выдерживать заданные очертания и их размеры. Должны присутствовать пояснительные надписи, легенда, а также указан масштаб.
Сегодня координаты замкнутого теодолитного хода вычисляются значительно проще, а создание всех графических материалов выполняется при помощи специализированных программ автоматически. Это значительно ускорило процесс выполнения геодезических работ и других инженерных изысканий.
Исходные данные для расчетов
Теодолитный ход может быть проложен в виде замкнутой фигуры или ломаной линии. Это зависит от характера снимаемой местности. Он является отличной геодезической основой для многих инженерных изысканий.
По итогу проведенных измерений составляется план или карта местности, а все вычисления заносятся в специальные ведомости. В нее заносятся следующие данные:
– горизонтальные углы пунктов;
– измеренное расстояние между ними;
– координаты пункта ГГС или опорной сети;
– значение исходного дирекционного угла.
Для привязки хода к пункту ГГС или опорной сети необходимо определить местоположение одной его точки относительно этого пункта. Это можно сделать, измерив расстояние и горизонтальный примычной угол между ними. Такая процедура называется передачей координат и дирекционных углов.
Виды засечек
В зависимости от местности и способов построения сетей сгущения в геодезии существует два основных вида привязки к опорным пунктам:
- Непосредственная. Подразумевает привязку теодолитного или полигонометрического хода к триангуляционным пунктам высшего класса с возможностью выполнить измерения примычных углов. Используется в тех случаях, когда на опорных точках можно выполнить те же измерения, что и на соседних.
- Косвенная. Проводится только при отсутствии возможности провести непосредственные измерения примычных длин и углов. К этому виду привязки и относится засечка.
![]()
По способу же построения геодезическая засечка бывает:
- линейной (полярные и биполярные по числу пунктов);
- угловой (прямая и обратная);
- комбинированной (положение точки определяют по известным углам и линейным расстояниям).
В геодезии чаще всего прибегают к комбинированию прямой и обратной засечек. Кроме того, чтобы полученные результаты были наиболее достоверными, измеряют больше величин, чем нужно, а само местоположение искомых пунктов получают посредством уравнивания.
Способ Кнейссля
Аналогично способу Деламбра последовательность формул при решении задачи обратной геодезической засечки по Кнейсслю будет иметь следующий вид:
- Определяются вспомогательные коэффициенты:
(k_{1}=(x_{2}-x_{1})ctgbeta_{1}+(y_{2}-y_{1}))
(k_{2}=(y_{2}-y_{1})ctgbeta_{1}+(x_{2}-x_{1}))
(k_{3}=(x_{3}-x_{1})ctgbeta_{2}+(y_{3}-y_{1}))
(k_{4}=(y_{3}-y_{1})ctgbeta_{2}+(x_{3}-x_{1}))
- Вычисляется котангенс дирекционного угла исходного направления на заданный пункт:
(c=ctgalpha _{1-P}=frac{k_{1}-k_{3}}{k_{2}-k_{4}})
- Приращения координаты точки Р относительно исходного пункта 1 находят при помощи нижеприведенных формул:
(Delta y_{1-P}=frac{k_{1}-ck_{2}}{1+c^{2}}=frac{k_{3}-ck_{4}}{1+c^{2}})
(Delta x_{1-P}=ccdot Delta y_{1-P})
- Определяются координаты точки Р:
(x_{P}=x_{1}+Delta x_{1-P})
(y_{P}=y_{1}+Delta y_{1-P})
- Средняя квадратическая погрешность вычисления местоположения пункта Р по трем направлениям вычисляется при помощи выражения:
(M_{P}=frac{d_{BP}cdot m”_{beta}}{rho ”sin(varphi_{1} +varphi_{2})} sqrt{frac{d_{1}^{2}}{a^{2}}+ {frac{d_{2}^{2}}{b^{2}}}})
- Оценивается точность обратной угловой засечки по способу Кнейссля с определением погрешности:
(M=sqrt{M_{1}^{2}+M_{2}^{2}})
- Допустимость в расхождениях полученных значений двух вариантов решений выполняется по формуле:
(r+sqrt{(x’-x”)^2+(y’-y”)^2}leq 3M)
Если данное условие соблюдено, то итоговое значение координат берется как среднее арифметическое значение из результатов двух решений.
Вычисление дирекционных углов
По известному дирекционному углу an и по исправленным горизонтальным углам bиспр вычисляются дирекционные углы остальных сторон теодолитного хода по формулам для правых горизонтальных углов:
– дирекционный угол последующей стороны равен дирекционному углу предыдущей стороны плюс 180° и минус исправленный горизонтальный угол правый по ходу.
Величина дирекционного угла не может превышать 360° и быть меньше 0°. Если величина дирекционного угла больше 360°, то из результата вычислений необходимо вычесть 360° (см. пример).



Контроль вычисления дирекционных углов. В замкнутом теодолитном ходе в результате вычислений получается дирекционный угол исходной стороны.
Пример вычисления дирекционных углов:
Дирекционный угол исходной стороны a1-2равен 45°45¢.
При вычислении дирекционного угла получилось значение 405°45¢. Из полученного значения вычитается 360°.
Контроль вычисления дирекционных углов получился.
Все результаты вычислений заносятся в таблицу «Ведомость вычисления координат» (табл. 2).
1.3 Вычисление приращений координат
Вычисление приращений координат выполняется по формулам:
,
где d – горизонтальное проложение (длина) линии; a – дирекционный угол этой линии.
Приращения координат вычисляются с точностью два знака после запятой.
Пример вычисления приращений координат:
Все результаты вычисления заносятся в табл. 2. Пример вычисления тригонометрических функций на калькуляторе приведен в отдельном файле.
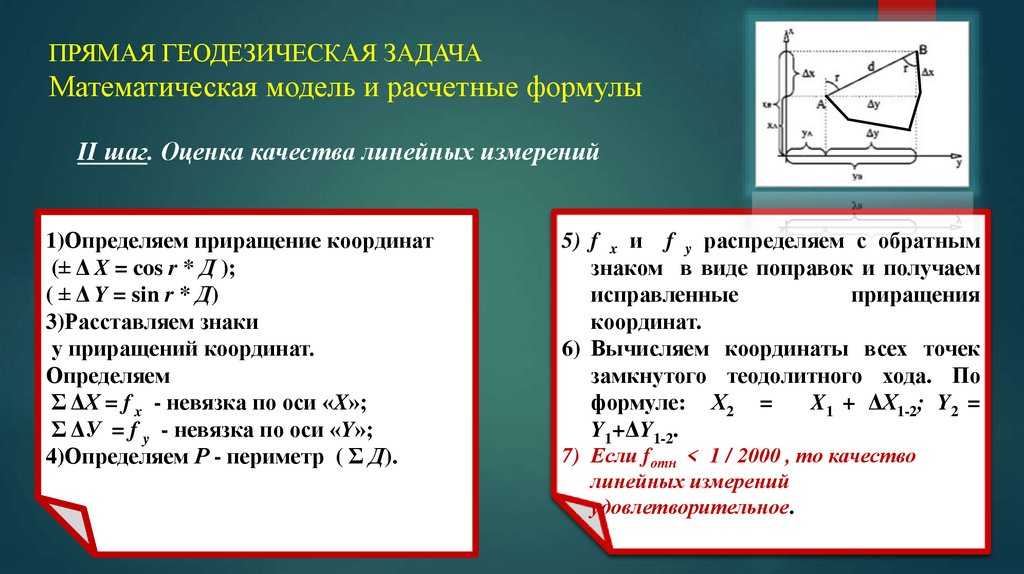
1.4 Уравнивание линейных измерений
Разность между суммой вычисленных приращений координат и теоретической суммой называется линейной невязкой хода и обозначается fХ и fY. Уравнивание линейных измерений выполняется по осям Х и Y.
Линейная невязка вычисляется по формулам:
Теоретическая сумма приращений координат зависит от геометрии хода. В замкнутом теодолитном ходе она равна нулю, тогда невязка равна
Прежде, чем распределять невязки в приращения координат, необходимо убедиться в их допустимости. Для чего вычисляется абсолютная невязка хода fабс
,
где Р – периметр хода (сумма длин сторон), м.
Относительная невязка сравнивается с допустимой .
В случае, когда полученная относительная невязка допустима, т.е. , то вычисляются поправки в приращения координат пропорционально длинам сторон. Невязки распределяются с обратным знаком. Если , то проверяются вычисления в п. 3.3 и 3.4.
Поправки в приращения координат dX и dY вычисляются по формулам с округлением до 0,01 м:
,
где dX и dY – поправка в приращение по оси Х и Y, соответственно, м; fX и fY – невязки по осям, м; Р – периметр (сумма сторон), м; di – измеренная длина (горизонтальное проложение), м.
Знак у поправки противоположен знаку невязки. Поправки записываются в «Ведомость вычисления координат». В примере (табл. 6) поправки показаны красным цветом.
После вычисления поправок следует сделать проверку, т.е. сложить все поправки. Если их сумма будет равна невязке с обратным знаком, то распределение невязки выполнено правильно. То есть:
Вычисляются исправленные приращения.
Полученные поправки алгебраически прибавляются к соответствующим приращениям и получаются исправленные приращения:
Контроль: сумма исправленных приращений в замкнутом теодолитном ходе должна равняться нулю, т.е. должно выполняться равенство:
Пример вычисления линейной невязки:
Пример вычисления поправок в приращения координат:
Контроль .
Контроль .
Поправки записываются в «Ведомость вычисления координат» над вычисленными приращениями. В примере поправки показаны красным цветом (Табл. 2).
Пример вычисления исправленных приращений координат:
Контроль ; Контроль .
Сумма исправленных приращений равна нулю, т.е. контроль выполняется.
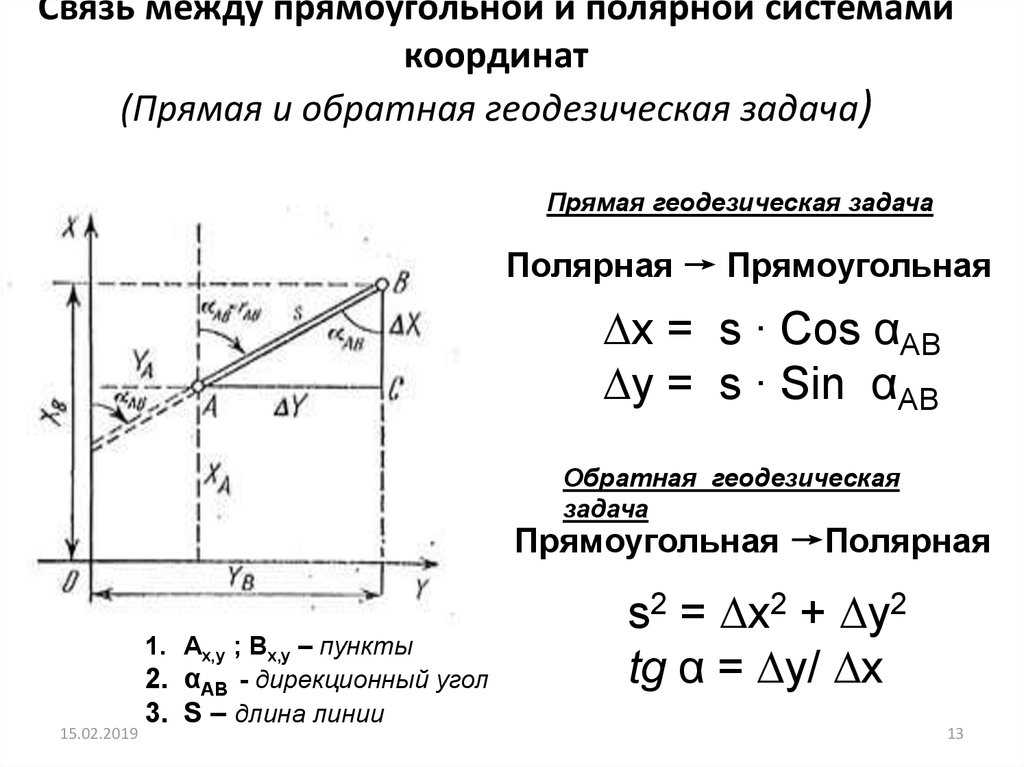
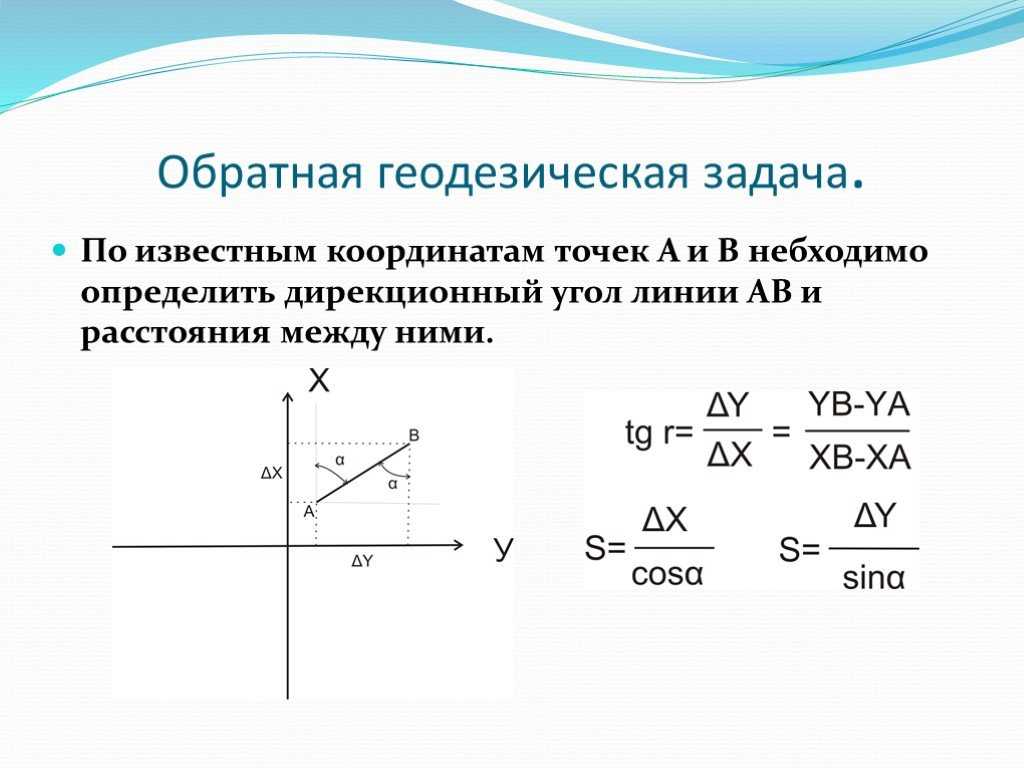
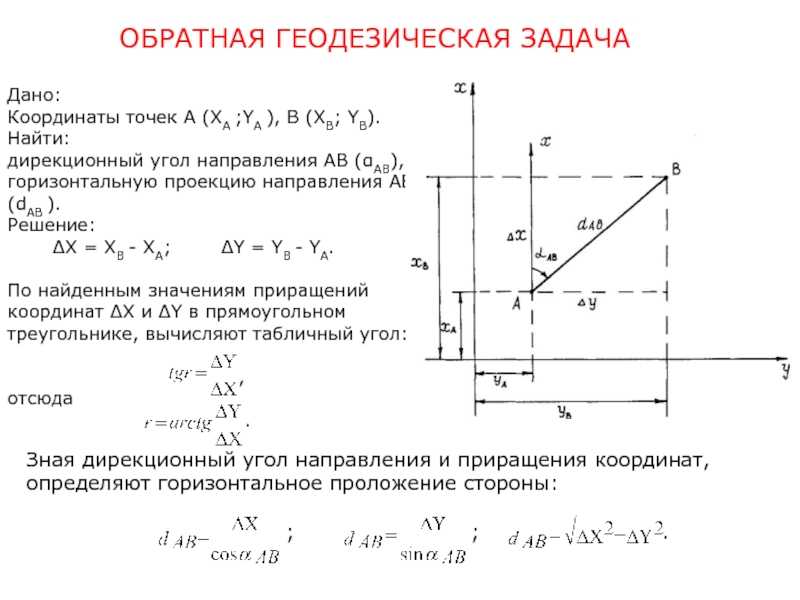
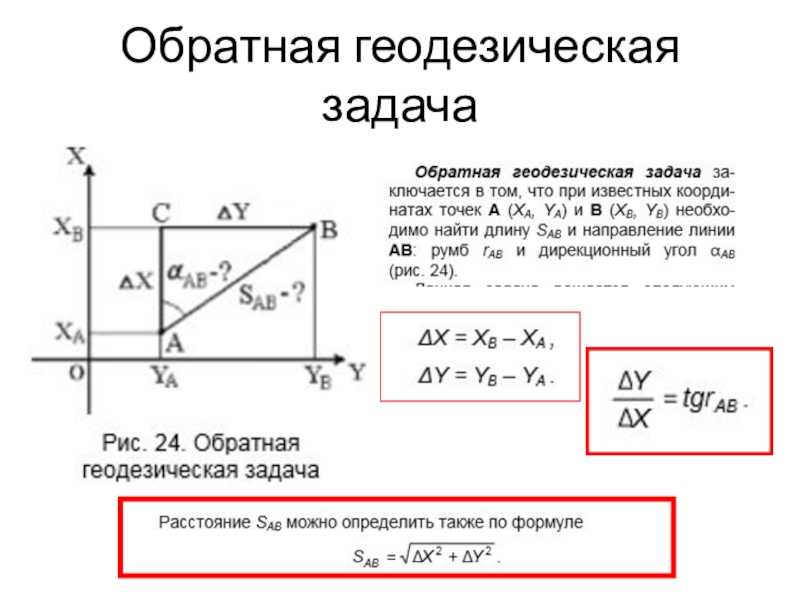
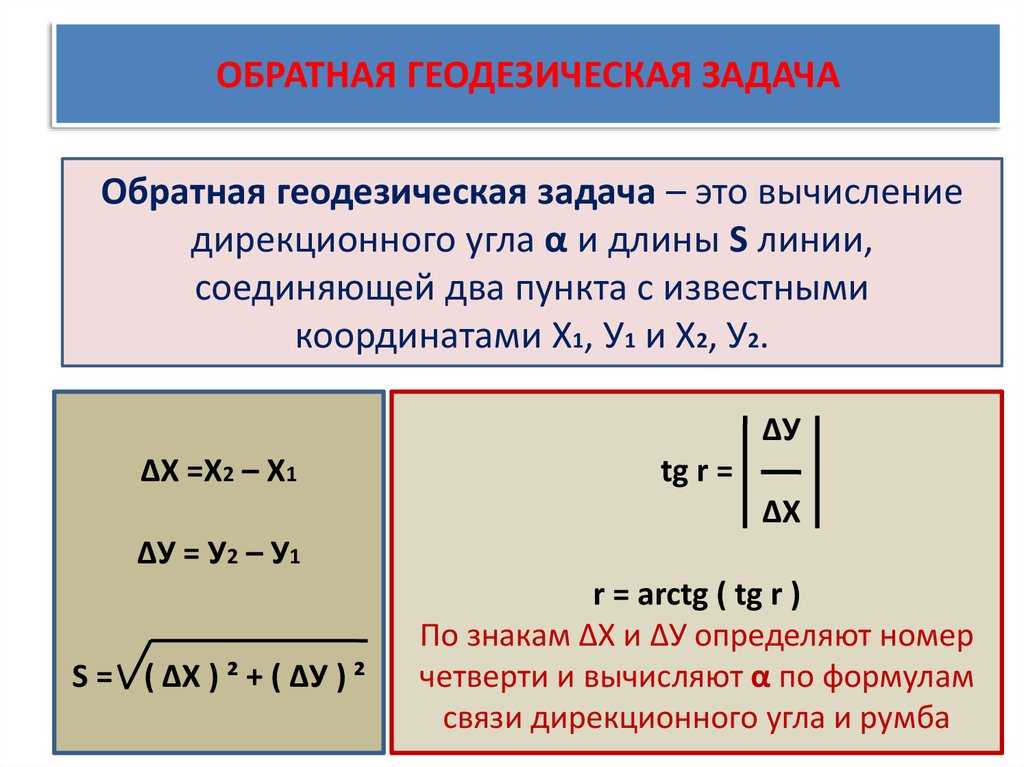
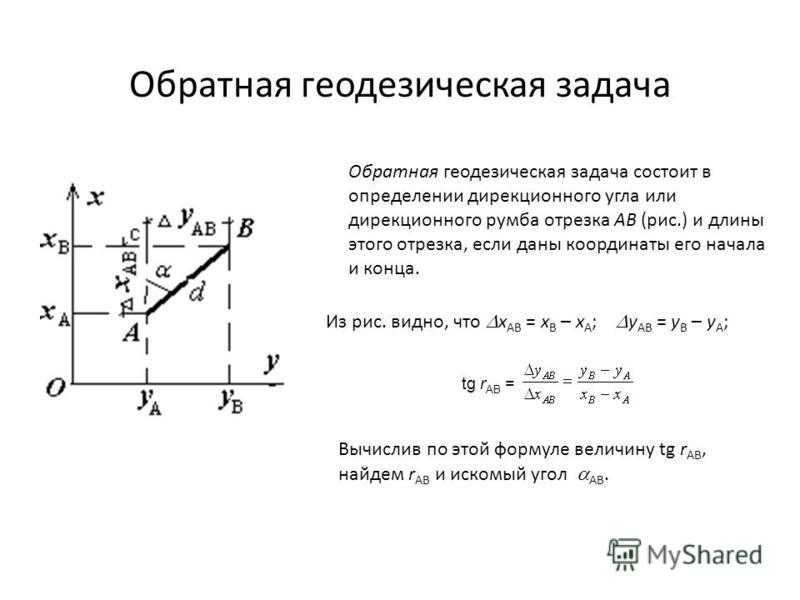
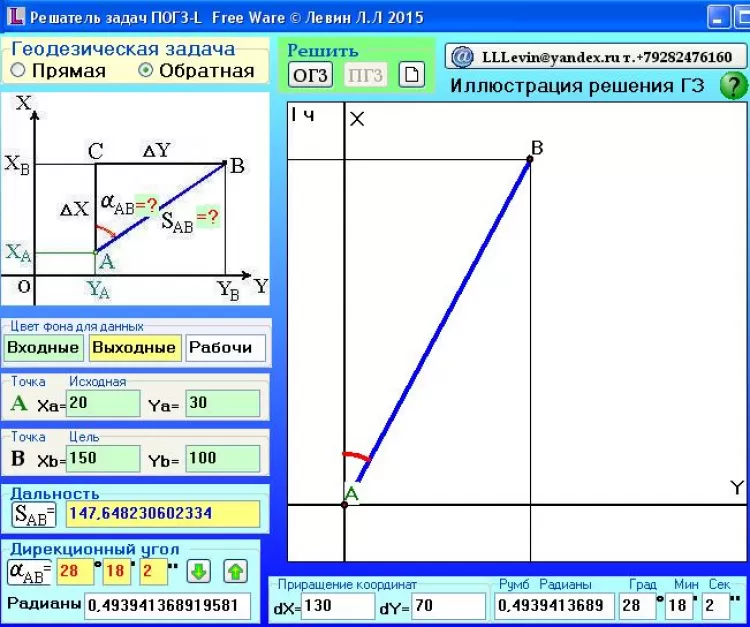
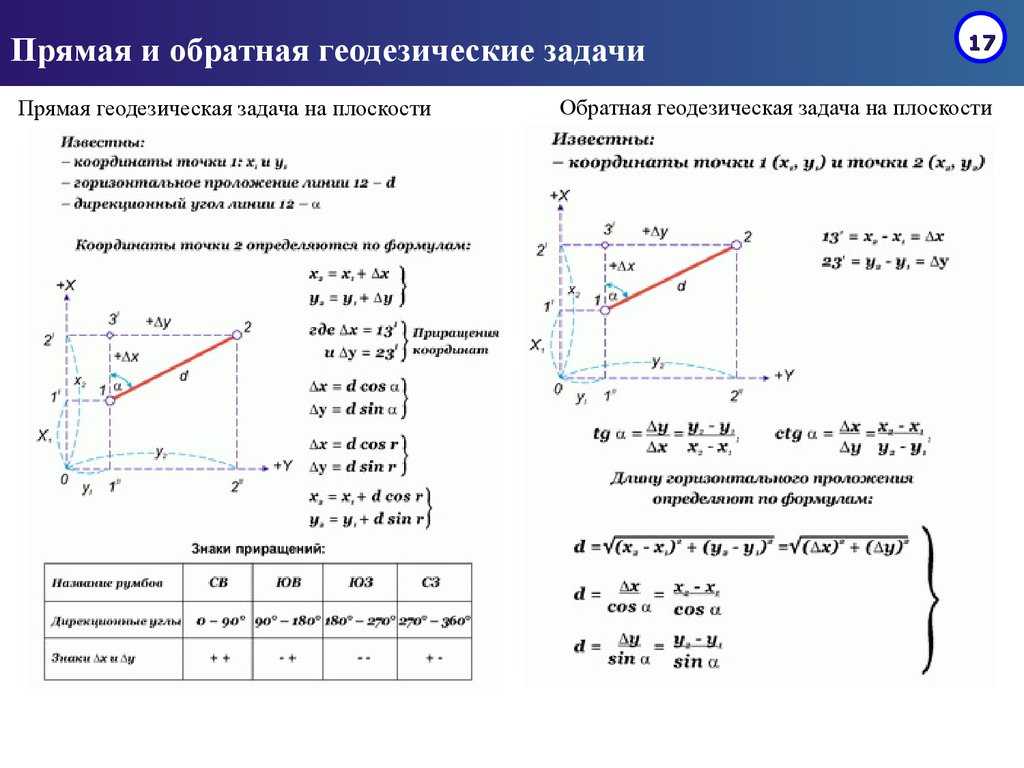
Обратная геодезическая задача.
Обратная
геодезическая задача (ОГЗ) на плоскости
заключается в нахождении дирекционного
угла α
направления
с одной точки на другую и расстояния Дмежду ними по
прямоугольным координатам данных точек.
И
XА,YА;
XВ,YВ
– прямоугольные координаты точек А
и В.
Требуется определить:
α –
дирекционный угол направления с точки
А на точку В;
Д –
расстояние (дальность) между точками
А и В.
В
прямоугольном треугольнике АСВ
катеты АС
и СВ
соответствуют приращениям координат:
АС
= ΔХ ; СВ =
ΔY;
Таким
образом, в прямоугольном треугольникеАСВизвестны два катета, по которым
можно определить все его остальные
элементы: острый уголСАВ, равный
дирекционному углуα, и гипотенузуД(дальность).
Обратная
геодезическая задача решается теми же
способами и средствами, что и прямая
геодезическая задача.
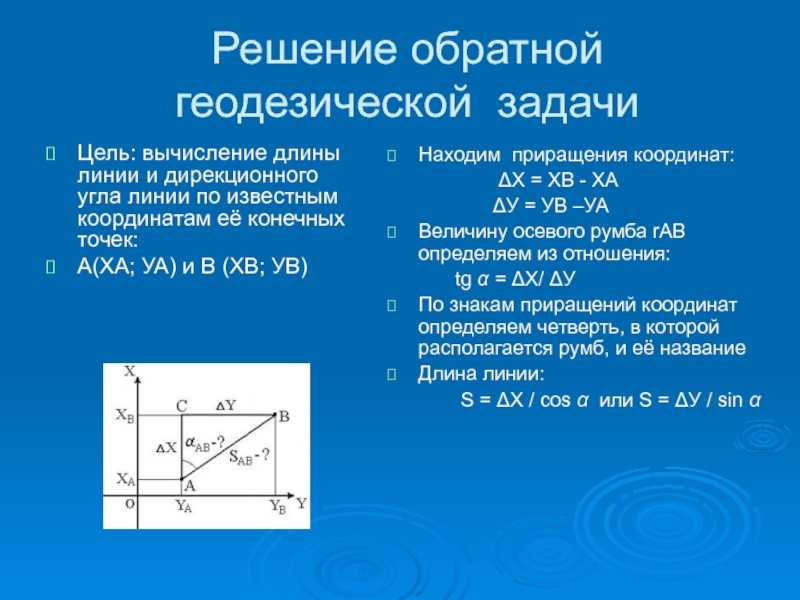
Огз решают в следующей последовательности:
Пусть
в точке А
находится огневая позиция (ОП), а в точкеВ –
цель (Ц).
1.
По известным координатам ОП и цели
вычисляют приращения координат ΔХ и
ΔY:
![]()
2.
Определить острый угол α´(рис.
22) по формуле:
![]()
-
От угла α´перейти к дирекционному углуα в соответствии со знаками приращений ΔX и ΔY, согласно схеме (рис. 23), или по таблице:
|
I |
ΔХ ΔY |
= |
|
II |
ΔХ ΔY |
= |
|
III |
ΔХ ΔY |
= |
|
IV |
ΔХ ΔY |
= |
-
Вычислить расстояние между ОП и Ц (из теор. Пифагора) по формуле:
![]()
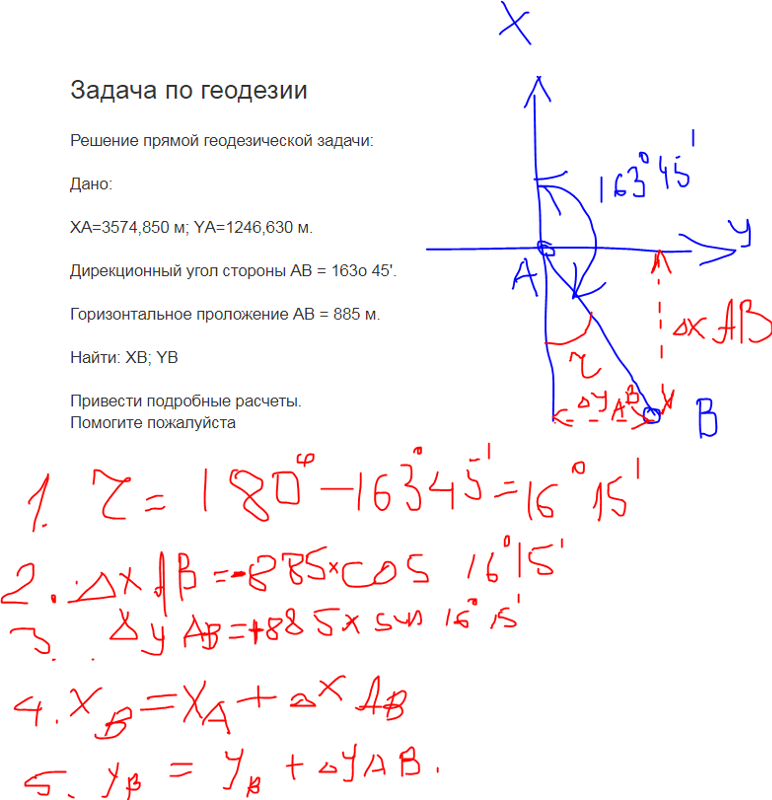
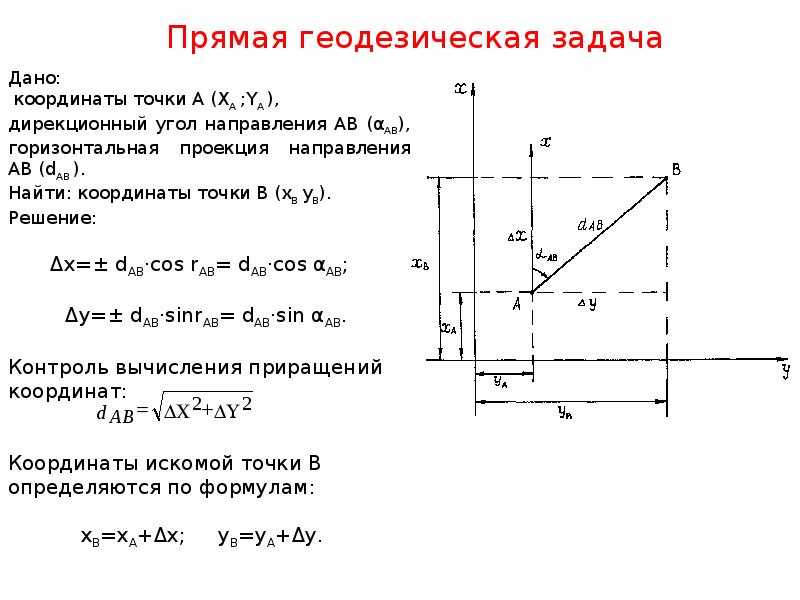
Пример
1.
По
прямоугольным координатам огневой
позиции XОП=
79 790, YОП=
16 350 и цели XЦ=
82 145, YЦ=
17 610 вычислить дирекционный угол α
с ОП на Ц и расстояние между ними Д.
Р е ш е н и е:
-
Вычислить приращения координат: Х = 82 145 – 79 790 = + 2355;
=
17 610 –16 350 = +1260;
-
Вычислить дирекционный угол α
![]()
-
Если
знаки приращений координат Х+,
+
: значит I
четверть,
= ,
дирекционный
угол будет
= 4-69;
-
Вычислить расстояние
О
т в е т:
= 4-69;
Д
= 2671 м.
Уравнивание приращений координат
_______Уравниванием называется совокупность математических операций, выполняемых для получения вероятнейшего значения геодезических координат точек земной поверхности и для оценки точности результатов измерений.
_______
Уравнивание проводится для устранения невязок, обусловленных наличием ошибок в избыточно измеренных величинах, и для определения вероятнейших значений искомых неизвестных или их значений, близких к вероятнейшим. В процессе уравнвиания это достигается путём определения поправок к измеренным величинам (углам, направлениям, длинам линий или превышениям).
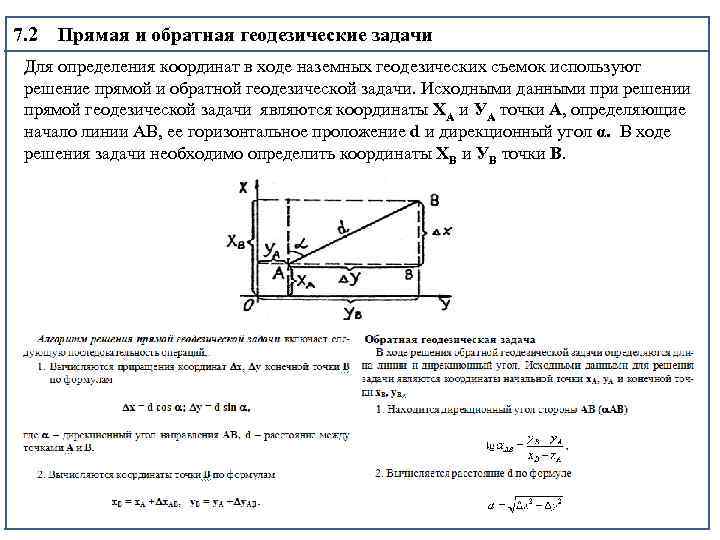
7.1. Вычисление координат точек теодолитного хода
_______
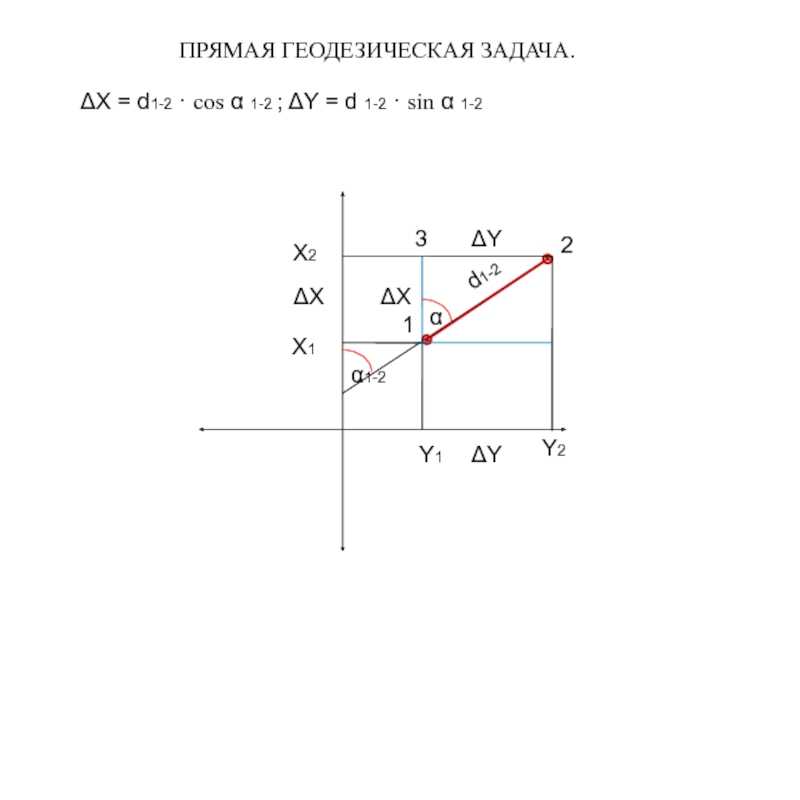
Из решения прямой геодезической задачи по известным длинам сторон и румбам вычисляются приращения координат для каждой стороны хода по формулам:
_______
Далее вычисляются невязки в приращениях координат замкнутого хода.
7.2. Вычисление невязок в приращениях координат замкнутого хода
_______
Из геометрии известно, что сумма проекций сторон многоугольника на любую ось равна нулю, следовательно:
_______
Под влиянием ошибок измерений замкнутый полигон будет разомкнутым на величину fр – абсолютная невязка в периметре полигона.
_______
Если полученная невязка недопустима, то необходимо произвести повторное измерение длин линий.
_______
Если невязки допустимы, то они распределяются на приращения координат пропорционально длинам сторон с противоположным знаком, то есть сумма исправленных приращений должна быть точно равна теоретической сумме – в данном случае равна нулю.
7.3. Вычисление невязок в приращениях координат разомкнутого теодолитного хода
_______
Определение допустимости невязок и их распределения производится так же, как для замкнутого теодолитного хода.
например
_______
По исправленным значениям приращений координат вычисляются координаты всех точек хода по формулам:
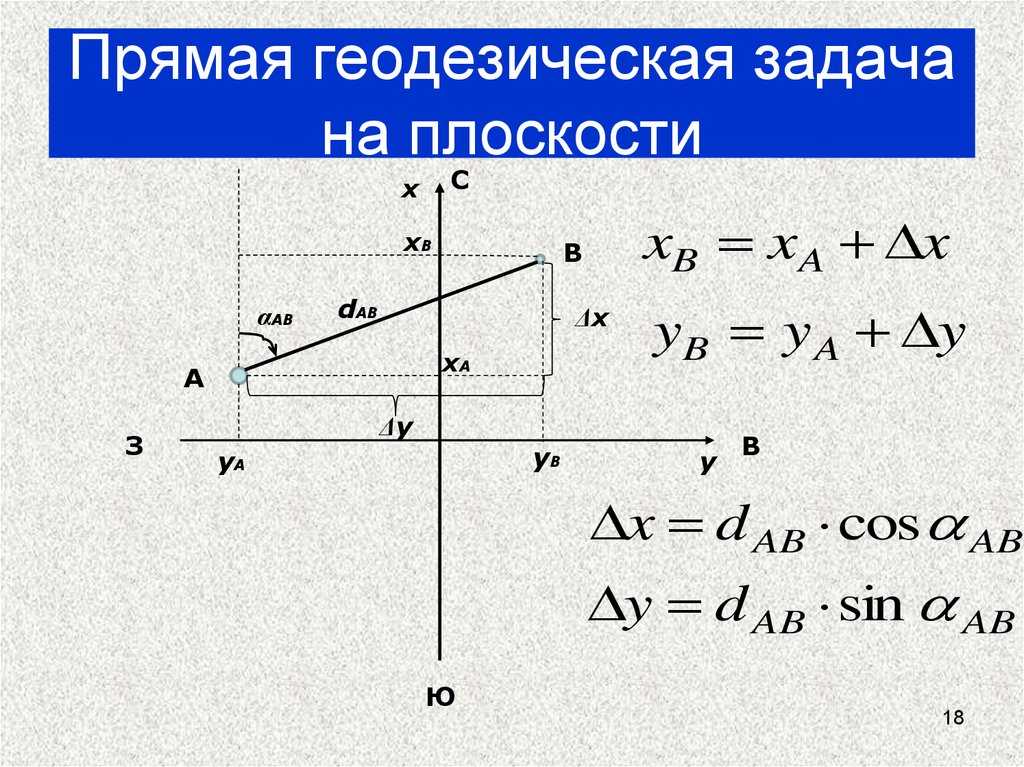
Приращение координат и их увязка
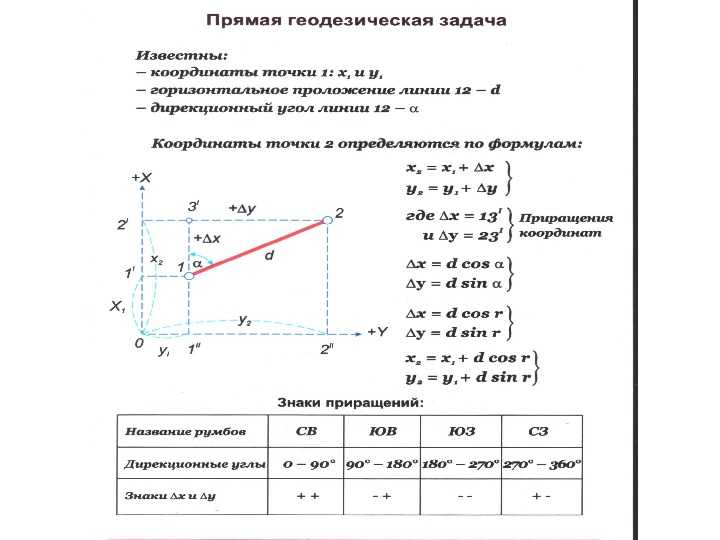
Приращением называют величины, на которые будут увеличены координаты предыдущей точки для вычисления последующей. В основу этих расчетов берется уже знакомая формула прямой задачи:
\(\Delta X=d\cdot cos \alpha \)
\(\Delta Y=d\cdot sin \alpha \)
Полученные значения также необходимо уровнять, чтобы равномерно распределить погрешности и получить наиболее точный результат. Начинают расчеты с определения невязок. Поскольку сумма проекций в сторонах многоугольной замкнутой фигуры равняется нулю, для вычисления невязок пунктов замкнутого хода используют следующую формулу:
\(f_{X}=\sum \Delta X_{выч}-\sum \Delta X_{теор};\sum \Delta X_{теор}=0\)
\(f_{Y}=\sum \Delta Y_{выч}-\sum \Delta Y_{теор};\sum \Delta Y_{теор}=0\)
\(\sum \Delta X_{выч},\sum \Delta Y_{выч}\) – суммы приращений, рассчитанные с учетом знаков для замкнутого и разомкнутого хода;
\(\sum \Delta X_{теор},\sum \Delta Y_{теор}\) – теоретические суммы приращений.
Вследствие влияния погрешностей на ход, он будет разомкнут на величину , которая представляет собой абсолютную невязку в его периметре. По этому причине проверяется соответствие условию допустимости его невязок.
- Абсолютное значение:
\(f_{p}=\sqrt{f_{x}^2+f_{y}^2}\)
- Относительное
\(f_{отн}=\frac{f_{абс}}{P}\)
P – периметр хода, полученный суммированием всех его сторон.
Допустимая невязка должна удовлетворять условие 1/2000, а при соответствии выражению \(|f_{отн}|\leq |f_{доп}|\) выполняют ее распределение с противоположным знаком. Однако перед этим рассчитывают поправки приращений, которые определяют для каждой стороны:
\(\delta _{x_{i}}=-\frac{f_{x}d_{i}}{P}\);\(\delta _\Delta {y_{i}}=-\frac{f_{y}d_{i}}{P}\)
\(\delta _{x_{i}},\delta _{y_{i}}\)– значения поправок в приращениях.
Чтобы упростить дальнейшие расчеты поправки, необходимо округлить их до 0,01 м.
Для разомкнутого хода за теоретическую сумму приращений берется разность между двумя соседними точками.
\(f_{X}=\sum \Delta X_{выч}-\sum \Delta X_{теор}; \sum \Delta X_{теор}=x_{B}-x_{A}\)
\(f_{Y}=\sum \Delta Y_{выч}-\sum \Delta Y_{теор}; \sum \Delta Y_{теор}=y_{B}-y_{A}\)
Для обоих ходов поправки имеют противоположный приращению знак. Уравнивание выполнено верно, если сумма исправленных приращений равна или максимально приближена к нулю.
Алгоритм решения обратной геодезической задачи
Один из таких алгоритмов — алгоритм Винчестера — широко применяется в геодезии и космической геодезии. Он основан на теореме косинусов и позволяет с высокой точностью находить координаты исходной точки.
Алгоритм Винчестера состоит из следующих шагов:
- Задать начальное приближение для координат исходной точки.
- Вычислить расстояние между начальным приближением и известными точками.
- Используя полученные расстояния и известные координаты, вычислить углы между известными точками и искомой точкой.
- На основе вычисленных углов и известных координат, определить координаты искомой точки с помощью тригонометрических соотношений.
Алгоритм Винчестера применяется в различных геодезических приложениях, таких как определение местоположения спутников, навигация и картография. Он позволяет получить точные результаты и учитывает сложность геодезической задачи.
Определение отметок точек
Отметки точек определяют по правилам, см. фрагмент листа карты (рис.1.1).
1. Точка лежит на горизонтали. Отметка точки равна отметке горизонтали: Н1=152.5 м.
2. Точка лежит между разноименными горизонталями. Отметка точки определяется графической интерполяцией на глаз: Н2=150+2.5/3=150.8 м.
3. Седловина. Отметка точки равна отметке ближней горизонтали ± полсечения рельефа: Н3=152.5+h/2=153.8 м или 155 – h/2 = 153.8 м.
4. Определяемая точка лежит между горизонталью и точкой с подписанной на карте отметкой. Отметка определяется графической интерполяцией: Н4=155+(156.9–155)/2=155.7 м.
5. Точка лежит на полугоризонтали: Н5 = 155 +h/ 2 = 156.2 м.
6 и 7. Отметки вершин: H6 =155 +h/ 2 = 156.2 м;H7 = 156.25 (полугоризонталь)+h/4=156.8 м.
Источник
Общие понятия о системах координат в геодезии
Столь глубокие познания о строении и форме Земли, которые человек осваивал на протяжении веков, сегодня позволяют создавать невероятно точные координатные системы и картографические проекции.
Координатные системы заданы двумя направлениями на плоскости, а в пространстве – тремя. Осевые направления всегда перпендикулярны друг другу, а ориентированы горизонтально и вертикально. Их пересечение и определяет местоположение точки в заданной системе.
В геодезии координатные системы разделены на следующие две группы:
- Прямолинейные прямоугольные. К ним причисляют проекцию Гаусса-Крюгера, индивидуальные референцные и местные системы.
- Полярные. Это геодезические, географические, астрономические, а также геоцентрические и топоцентрические координаты.
Теодолитный ход можно считать самым распространённым плановым обоснованием. Он не требует дорогостоящего и высокоточного оборудования, но помогает создать надежную плановую основу на территориях со сложной местностью. Его развивают от пунктов государственных геодезических сетей (ГГС) и сетей сгущения с уже установленными координатами.
Вычисляются координаты точек замкнутого и разомкнутого теодолитного хода посредством нахождения дирекционных углов его сторон и решения прямой геодезической задачи. Но перед этим следует проверить, соответствуют ли измерения нормативным требованиям.