

Введение.
Традиционные методы геодезических измерений и графического отображения полученной информации на бумажных носителях остались в прошлом. Современное геодезическое обеспечение инженерно-строительных изысканий, проектирования и строительства различных объектов, а также инвентаризации, кадастра и оценки объектов недвижимости базируется на использовании принципиально новых геодезических приборов и технологий, геодезических информационных систем пространственных баз данных. Все полевые измерения и съёмки выполняются сейчас электронными приборами с автоматической регистрацией результатов, автоматизированы и все последующие процессы геодезического производства.
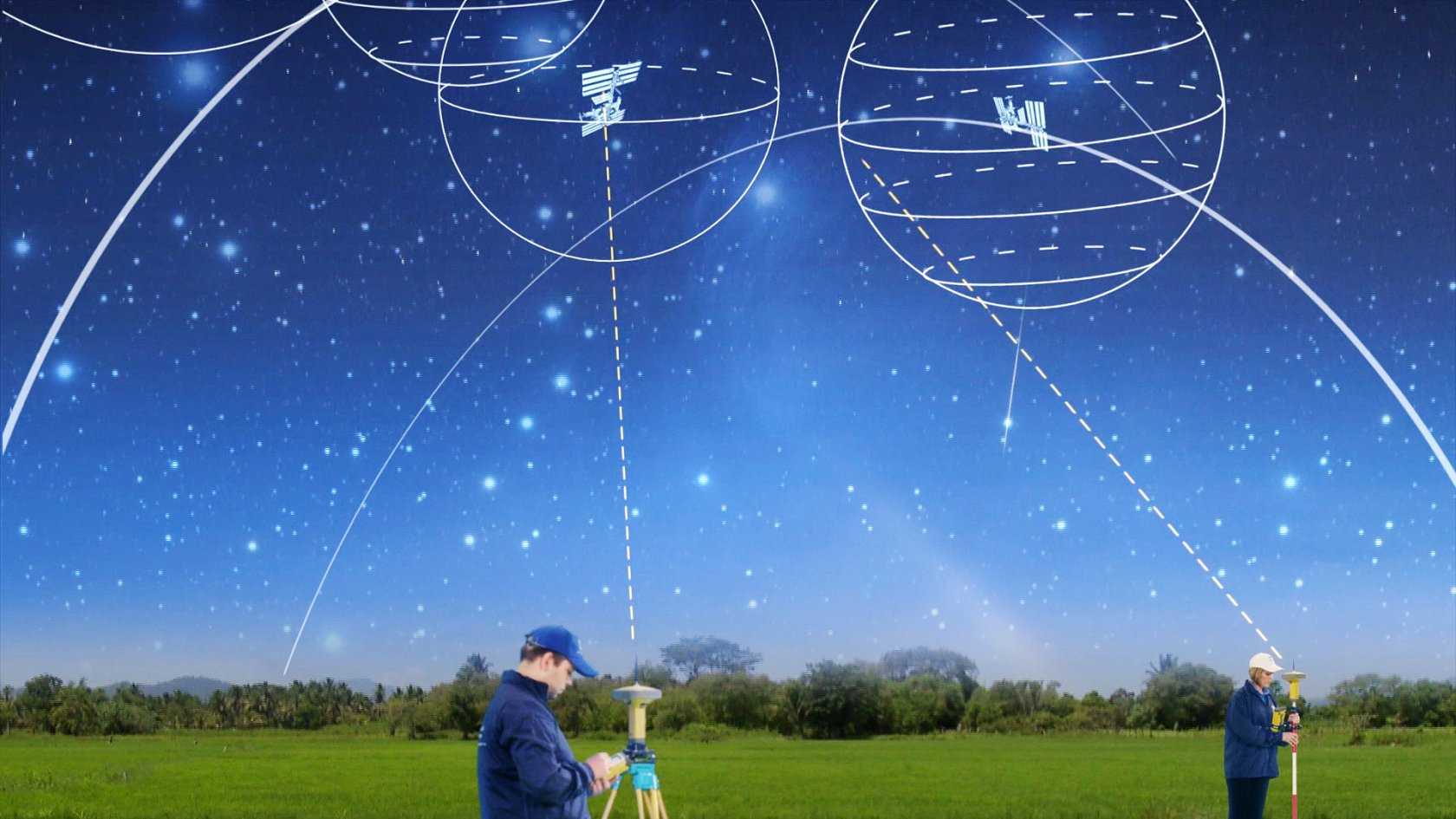
Замена традиционных средств измерений на электронные привела к появлению новых методов и технологий геодезических работ. Спутниковые радионавигационные системы (СРНС) и геодезических приемников принципиально изменило методику построения опорных геодезических сетей. Термин «GPS технологии» (или ГЛОНАСС/GPS технологии) применяется для способов определения координат с применением спутниковых радионавигационных систем– американской системы GPS и российской ГЛОНАСС. Каждая из этих СРНС при полном развертывании состоит из 24 спутников, вращающихся на орбитах с высотой около 20000 км. Спутники непрерывно передают сигналы, содержащие информацию об их положении и точном времени, а также дальномерные коды, позволяющие измерить расстояния.
Определение координат пользователя СРНС производится с помощью специальных спутниковых приемников, измеряющих либо время прохождения сигнала от нескольких спутников до приемника, либо фазу сигнала на несущей частоте. В первом случае расстояния измеряются с метровым уровнем точности, во втором случае – с миллиметровым уровнем точности. При этом реализован однонаправленный метод измерения расстояний, поскольку и GPS, и ГЛОНАСС являются беззапросными спутниковыми системами, допускающими одновременное использование их многими пользователями.
Каждый приемник может производить измерения либо независимо от других приемников, либо синхронно с другими приемниками. В первом случае, достигается точность однократного определения координат по кодам порядка 1-15 м. Такой способ идеально подходит для навигации любых перемещающихся объектов, от пешеходов до ракет. Однако более высокую точность можно получать при одновременных наблюдениях спутников несколькими приемниками по фазовым измерениям. При таком способе наблюдений один из приемников обычно располагается в пункте с известными координатами. Тогда положение остальных приемников можно определить относительно первого приемника с точностью нескольких миллиметров. При этом возможны измерения на расстояниях от нескольких метров до тысяч километров. Кроме определения местоположения границ земельного участка также необходимы кадастровый учет и государственная регистрация.
Принципиальным достоинством спутниковых методов позиционирования является возможность определения координат в любое время суток и в любой точке. Отпадает необходимость наличия прямой видимости между исходными и определяемыми пунктами. Это позволяет сократить сроки выполнения геодезических работ , снизилось влияние многих погрешностей, в том числе зависящих от исполнителя.
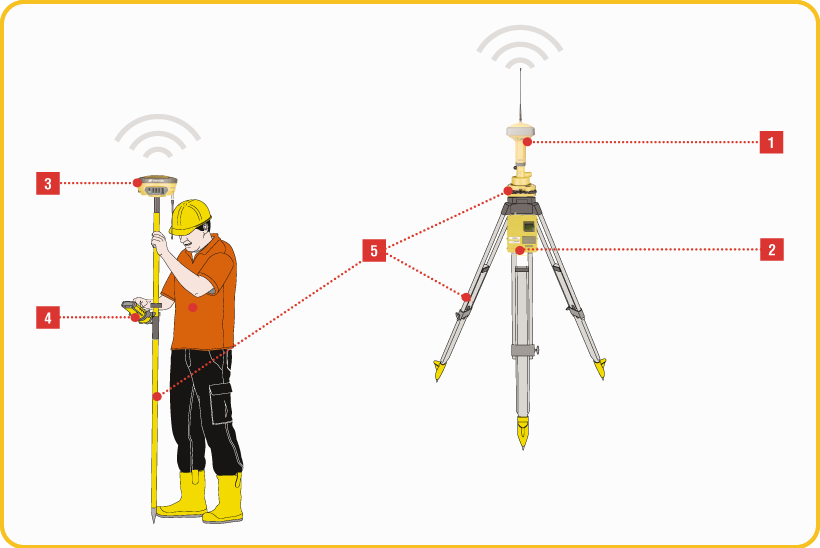
Состав спутникового GNSS-комплекта
Как правило, приемники не продаются по одиночке, а идут сразу в комплекте. Стандартный набор подобного оборудования состоит из:
- Двух спутниковых приемников;
- Полевого контроллера с установленным программным обеспечением;
- Спутниковой антенны типа GNSS;
- Передающего устройства (модема).
Текущие технологии уже достигли такого уровня развития, что весь вышеперечисленный комплект может быть заключен в одном приборе. Основная сфера применения данных моноблоков – кадастровые и геодезические работы. Существуют устройства, в которых контроллер вынесен отдельно и такие приборы именуются «наладонниками». В них очень просто обновить операционную систему и управляющие программы.
1.1. Спутниковые радионавигационные системы
Системы спутниковых определений координат первоначально развивались для навигационных целей и обеспечивали точность, не превышающую нескольких метров. Однако современные геодезические приёмники, методы математической обработки позволяют определять плановые координаты с погрешностями 5. 10 мм, высотные — 15. 30 мм и меньше. Их точность удовлетворяет требованиям построения опорных геодезических и межевых сетей, обеспечения кадастровых, землеустроительных, изыскательских и других инженерно-геодезических работ. При этом не требуется обеспечивать взаимную видимость между пунктами, строить над ними высокие сигналы, проводить комплекс точных угловых и линейных измерений. Спутниковые измерения выполняются в любых погодных условиях в течение нескольких минут, что существенно упростило производство полевых работ. Однако для наблюдения навигационных спутников (НС) небесный свод над приёмником должен быть достаточно свободен от застройки и растительности.
Структура, способы функционирования и требуемые характеристики подсистем СРНС во многом зависят от заданного качества навигационного обеспечения и выбранной концепции навигационных измерений. Для достижения таких важнейших качеств, как непрерывность и высокая точность навигационных определений, в глобальной рабочей зоне в составе со временной СРНС типа ГЛОНАСС(глобальная навигационная спутниковая система Р.Ф) и GPS(США) функционируют три основные под системы космических аппаратов (ПКА), состоящая из навигационных спутников (НС):космическим сегментом; контроля и управления ;сегмент потребителей СРНС(аппаратура потребителя) . Разнообразие видов приемоиндикаторов СРНС обеспечивает потребности наземных, морских, авиационных и космических (в пределах ближнего космоса) потребителей.
Основной операцией, выполняемой в СРНС с помощью этих сегментов, является определение пространственных координат местоположения потребителей и времени, т. е. пространственно-временных координат (ПВК). Эту операцию осуществляют в соответствии с концепцией независимой навигации, предусматривающей вычисление искомых навигационных параметров непосредственно в аппаратуре потребителя. В рамках этой концепции в СРНС выбран позиционный способ определения местоположения потребителей на основе пассивных дальномерных измерений по сигналам нескольких навигационных искусственных спутников Земли с известны микоординатами .
Высокая точность определения местоположения потребителей обусловлена многими факторами, включая взаимное расположение спутников и пара метры их навигационных сигналов. Структура космического сегмента обеспечивает для потребителя постоянную видимость требуемого числа спутников.
Рис.1 Спутник ГЛОНАССА
Режимы работы GPS
«Статика» (STATIC)
Метод статических определений. Наиболее точный из всех методов. Позволяет получить миллиметровую точность. Используется для передачи координат от изветсных пунктов к определяемым пунктам. Минимальный комплект приемников: 2 штуки. Один из приемников называют «база», второй «ровер». Базовый приемник устанавливается над пунктом с известными координатами. Замеряется его высота над точкой и он включается. Затем второй приемник (ровер) устанавливается на объекте над точкой, координаты которой мы хотим узнать. Приемники работают некоторое время. После измерений ровер переставляют на другие определяемые точки и повторяют наблюдения. Потом данные обрабатывают на компьютере и получают координаты определяемых точек. При этом измерения можно вводить в «сеть». Например провести насколько сеансов в разное время с разных пунктов, разными приемниками – свести их в единую сеть на компьютере, обсчитать и уравнять.
Цепочка информации будет выглядеть так:
Тут критически важно знать, что время измерений – это время в течении которого работают оба приемника (совместно). Именно совместная работа приемников с наличием общих спутников потом позволит получить координаты точек
От одной базы может работать множество роверов.
Пример временной записи:
В этом примере всего процесс занял у нас 2 часа (12-14), но полезное время совместных измерений было только 30 минут (12:30 – 13:30). Надо указать, что расстояние между базой и ровером для приемников L1 не должно превышать 20км, а для приемников L2 – до 50 км. Измерения при базисе больше 50 км для приборов L2 проводить можно, но они обрабатываются в специальных программах. Ограничение по расстоянию связано с кривизной земли и наличием общих спутников во время сеанса наблюдений. Однако стоит сказать, что когда я работал в аэрофотосъемке — мы используя специальные программы и приборы типа L2 обрабатывали базисы в 200-300 км. То есть это возможно, но требует дополнительных знаний.
Расчет времени работы в статике:
Каждая модель GPS приемника имеет обычно свои указания по расчету времени работы. Ниже приведу «примерное» время работы исходя из своего опыта. Основные параметры влияющие на время сеанса: количество спутников, расстояние между приемниками и PDOP. Обычно достаточно знать расстояние между приемниками для планирования сеанса.
Расчет времени работы в статике приборами L1:
| Расстояние | Время сеанса |
| 0-5км | 20 мин (лучше 30 мин) |
| 5-10 | 1 час |
| 10-20 | 2 часа |
| 20-… | 3 часа |
Расчет времени работы в статике приборами L2:
Общая формула 10 мин. + 0,5минут на км
Пример: Расстояние базиса 20 км = 10мин+0,5*20мин = 20мин
2й вариант (более точный)
| Количествово спутников | Формула |
| 10 | 10мин+2мин/км |
| 8 | 10мин+5мин/км |
| 6 | 10мин+10мин/км |
Режим работы «Стой-иди» (STOP&GO)
Режим очень похож на статику с той лишь разницей, что ровер стоит над каждой точкой около 3-х минут и перемещается далее. В приемниках L1 такой режим позволял проводить съемку открытых пространств. С появление RTK режима – теперь практически не используется.
Основные моменты:
Расстояние база ровер – менее 20 км
Время стояния ровером на точке – 3мин
Применяется для топосъемки открытых площадок приемниками L1
Основной современный режим съемки GPS оборудованием для проведения топографических съемок.
Надо сказать, что не смотря на наличие такого режима привязку временных реперов и других точных пунктов надо делать в режиме «статика».
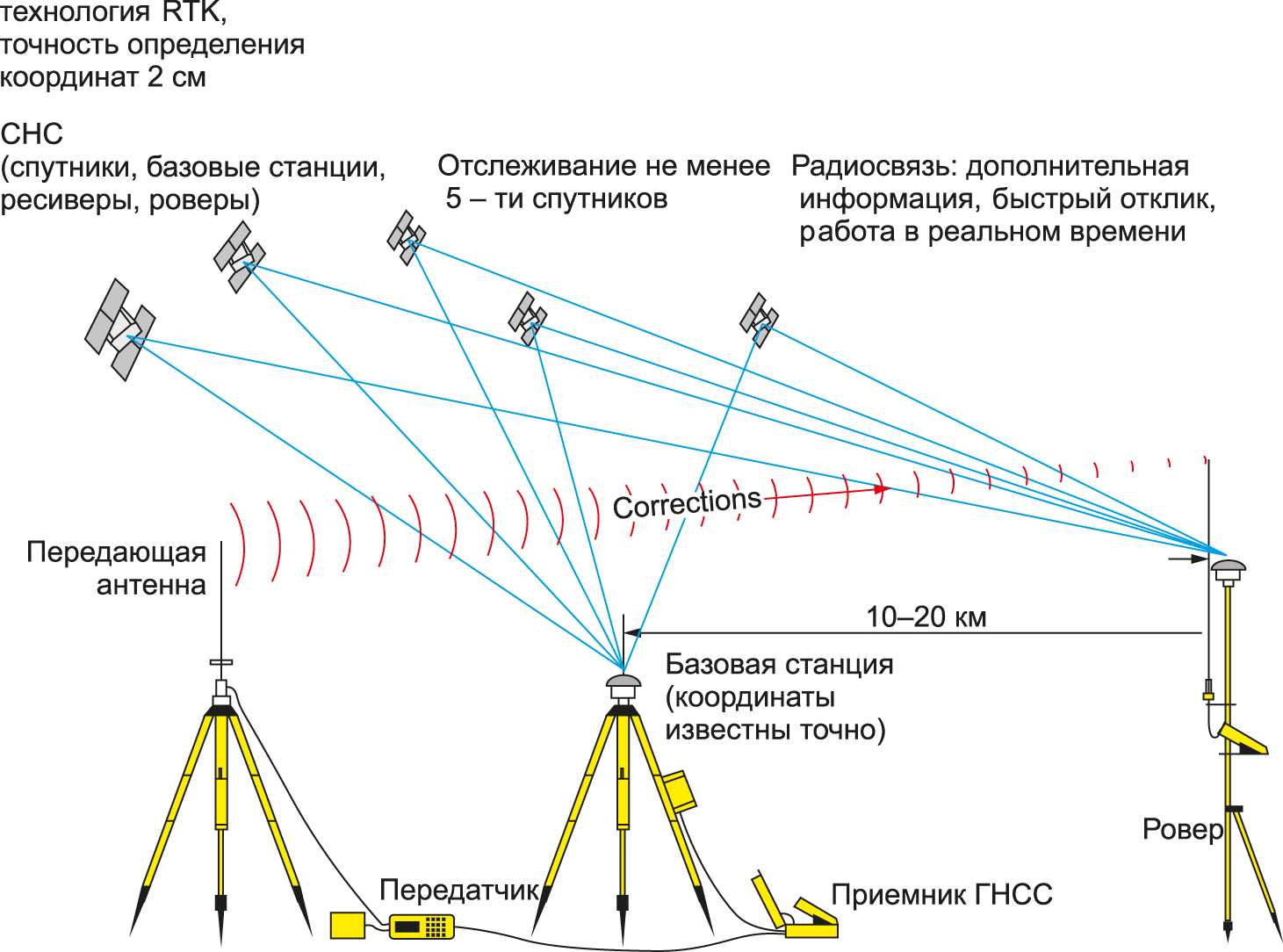
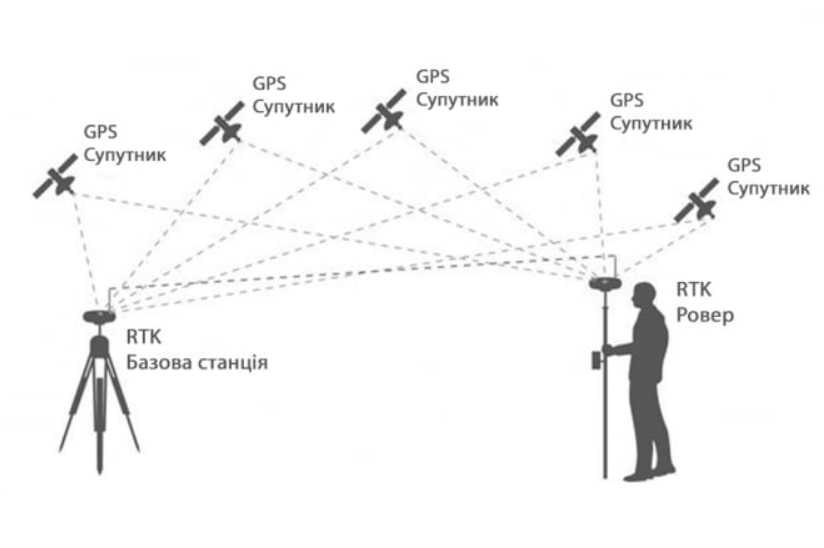
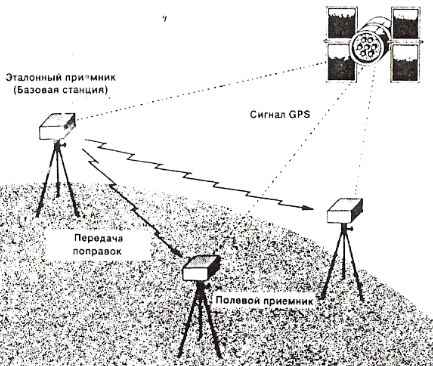
Основная идея:
База стоит над точками с известными координатами и через канал связи передает некие «поправки» роверу. Ровер их принимает и выдает координаты своего местоположения с
высокой точностью.
Точность = примерно 10мм + 0,5мм * Дальность,км
Пример:
При удалении от базы на 20км получим точность ровера:
10мм + 0,5мм * 20км = 20мм
Это без учета всех остальных поправок. На практике получаем точность 5-50 мм., в зависимости от рельефа местности, может быть гораздо больше…
Преимущества GPS приёмников
Применение приёмника геодезического упрощает проведение изысканий, так как исключается необходимость в прямой видимости на пункты ГГС, соответственно исключается потребность в проведении работ для создания полигонометрических и тахеометрических ходов. По большому счету, приёмником может выступать даже смартфон, с соответствующим ПО, но, естественно, геодезические компании пользуются высокочастотными, специализированными приёмниками. Среди преимуществ GPS приёмников стоит выделить:
- Оперативность.
- Мобильность.
- Возможность проведения измерений в сложных условиях.
- Исключается необходимость в прямой видимости на пункты государственной геодезической сети.
Полученные в ходе изысканий данные обрабатываются специалистами и на их основе составляются схемы.
-
Реферат на тему моральное здоровье
-
Реферат на тему принцип работы центрифуги и сепаратора
-
Випк мвд россии домодедово темы рефератов
-
Алкоголизм и его последствия для здоровья сообщение по химии реферат
- Технология производства земляных работ в стесненных условиях реферат
Методы GPS измерений
Существует несколько методов работы с GPS приемниками, которые различаются по времени нахождения приемника на точке, координаты которой определяются:
- статический – наблюдения проводятся не меньше часа, точность измерений 5 мм + 1 мм/км;
- быстростатический – 15-20 минут, точность сравнима со статическим методом, но менее достоверна;
- кинематический – длительность 30 секунд, точность 1-2 см + 2 мм/км;
- непрерывный кинематический – с непрерывным движением приемника по линейным объектам, точность 10-15 см;
RTK-метод, наиболее современный, скорость измерений несколько секунд, а точность сопоставима с быстростатическим способом.
-
Ожидаемые образовательные результаты работы специалистов в доу по адаптации
-
Принцип разделения властей в конституции сша 1787 кратко
-
Роль изменчивости в эволюционном процессе кратко
-
Роль в природе малощетинковых червей кратко
- Принцип работы дистиллятора воды кратко
Преимущества субцентиметровой геолокации
Субцентиметровая геолокация представляет собой высокоточный метод геодезической съемки, использующий GPS-технологии. Он позволяет определять координаты объектов с точностью до нескольких миллиметров, что делает его особенно полезным в ряде областей.








Один из главных преимуществ субцентиметровой геолокации заключается в ее высокой точности. Благодаря этому, данный метод находит применение в строительстве и промышленности, где требуется высокая точность определения координат для размещения объектов или контроля деформаций конструкций.
Субцентиметровая геолокация также находит применение в агрокультуре и геоинформационных системах. С ее помощью можно точно определить местоположение поля, оценить состояние почвы и уровень влажности, провести анализ плодородия земли и разработать оптимальные методы ухода за культурами.
Благодаря точности и высокой разрешающей способности, субцентиметровая геолокация также применяется в области геодезии и картографии. Она позволяет создавать точные карты местности, определять границы участков земли и контролировать перемещения земельных масс.
В заключение, субцентиметровая геолокация является уникальным методом геодезической съемки, который обладает высокой точностью и широким спектром применения. Этот метод значительно улучшает возможности в определении координат объектов и открывает новые перспективы в различных областях деятельности.
Обзор действующих спутниковых систем навигации
Глобальными спутниковыми системами являются ГЛОНАСС (Россия) и GPS (США). Разработкой технологий занимаются также страны Европы, Китай, Индия. Их основное оборудование не достигло уровня американских систем, но специалисты трудятся над этим.
Спутниковые системы
GPS
Это навигационная система США, работающая с 1978 года. Она выполняет позиционирование, навигацию и синхронизацию, состоит из космического, управляющего и пользовательского сегмента. Систему разработало и реализовало Министерство обороны США. Сейчас она доступна и для обычных граждан – им достаточно только купить телефон на ОС «Андроид» или планшет с GPS-датчиком.
Спутники транслируют сигнал с космоса, приемники используют его для вычисления координат и наблюдения за объектом в режиме реального времени. В технологии применяется 32 спутника, которые вращаются по орбите Земли.
ГЛОНАСС
С помощью системы определяют расположение и скорость движения авиации, морского, наземного и космического транспорта. Испытание оборудования и строительство спутников начали в 1995 году, но недостаточное финансирование не позволило ГЛОНАСС обрести глобальный характер.
Полноценное функционирование началось в 2010 году. Сейчас спутники активно взаимодействуют с GPS. Они подключаются к ближайшим объектам, что увеличивает скорость работы, точность.
DORIS
Преимущество технологии – в высокоточном определении орбиты и отслеживании маяков. Это система микроволнового слежения, основанная на принципе Доплера. Цель ее работы – измерения для услуг POD и приложений геодезии. Также она способна в один заход определить координаты орбит, осуществить геофизическое моделирование и позиционирование наземных маяков.
Beidou
Это китайская технология для осуществления геодезических, метрологических и других наблюдений за объектом. Оборудование включает около 38 спутников. Планируется, что на полную мощность система выйдет в 2020 году, поэтому ее характеристики стараются улучшить. Обеспечивает геометрическую сеть GNSS-наблюдений.
Galileo
Использование системы распространено среди обычных граждан и служб стран Европы. Отличие от ГНСС США и России в том, что ее не контролируют национальные военные ведомства. Но допускается возможность использовать сигнал для операций для обеспечения политики безопасности.
В перечисленных технологиях пользуются различными, чаще национальными, системами координат.
| Навигационная система | Система координат |
| ГЛОНАСС | ПЗ-90 (Параметры Земли 1990 года) |
| GPS | WGS-84 (World Geodetic System) |
| Система координат ГАЛИЛЕО | GTRF (Galileo Terrestrial Referenfce Frame) |
| БЕЙДОУ | CGCS2000 (China Geodetic Coordinate System 2000) |
Основы геодезической съемки GPS
GPS состоит из сети спутников, которые постоянно передают сигналы на поверхность Земли. GPS приемник, установленный на съемочной станции, принимает сигналы от нескольких спутников, которые позволяют определить точное местоположение станции на поверхности Земли.
Основная идея геодезической съемки GPS заключается в измерении времени, требуемого для прохождения сигналов от спутников до приемника. Когда сигналы приняты, GPS приемник рассчитывает расстояния до каждого спутника на основе времени задержки сигналов. Затем, используя известные координаты спутников, GPS приемник определяет свое собственное местоположение с высокой точностью.
Для проведения геодезической съемки GPS требуется специальное оборудование, включающее GPS приемник, треногу или штатив для установки приемника, а также специализированный софт для обработки полученных данных
При выборе GPS приемника необходимо обращать внимание на его характеристики, такие как частота обновления координат, возможность работы в реальном времени, точность измерений и дальность приема сигналов
Геодезическая съемка GPS широко используется в различных отраслях, включая геодезию, строительство, картографию, сельское хозяйство и геологию. Этот метод позволяет точно определить координаты объектов на местности, создавать цифровые карты и модели рельефа, контролировать деформации и движения земной коры, а также выполнять множество других задач, связанных с пространственным анализом.
Уравнивание и оценка точности результатов измерений
После предварительной
обработки выполняется уравнивание. Уравнивание производится в несколько этапов.
На первом этапе
выполняется так называемое «свободное» уравнивание, которые производится без
фиксирования координат опорных пунктов. Данный процесс позволяет оценить всю
сеть целиком и качество каждого пункта в отдельности. Особенность этапа
заключается в отсутствии влияния ошибок координат исходных пунктов. В
результате возможно принятие решения об исключении или повторного выполнения
отдельных измерений.
На втором этапе
производится поочерёдная фиксация координат опорных пунктов с одновременным
выполнением анализа о пригодности каждого пункта для выполнения уравнивания сети.
В результате возможно принятие решений об исключении или необходимости
добавления других опорных пунктов.
В результате уравнивания создаётся подробный отчёт, в котором проводится оценка качества выполненной работы, каталог уравненных координат и высот с оценкой точности каждого определяемого пункта. Пример такого отчёта:
Разница в GPS приемниках геодезических и обычных
Второе различие- приемники в навигаторах работают в одиночку и определяют свое абсолютное местоположение. То есть без дополнительных уравниваний и других приемников. Они самодостаточны. Точность определения может достигать 20 и более метров. А геодезические приемники работают минимум в паре. Один находится на пункте с известными координатами (база), а второй- на определяемом пункте (ровер). Они находятся в относительной близости друг от друга (до 50 км) и должны получать сигналы от одинаковых спутников. Получается, что координаты определяемого пункта вычисляются не относительно летающих спутников, а относительно известного пункта. За счет этого точность определения положения приемника достигает 1-2 сантиметра.
Важным в этом случае является выбор пунктов ГГС (где база стоит), к которым будут привязываться спутниковые измерения. Эти пункты нужно знать, где искать. Нужно иметь их координаты в необходимой системе и знать, какие можно использовать для расчетов, а какие нет. Так как закладывались пункты ГГС в середине прошлого столетия, и многие из них утеряны или имеют большую ошибку в местоположении. Для исключения погрешности самих исходных пунктов приходится пользоваться сразу несколькими и проводить уравнивание, исключая совсем бракованные экземпляры. Пункты находятся на расстоянии в среднем 5- 15 км друг от друга в европейской части России. Представьте, какую работу нужно сначала провести, чтобы в итоге на объекте приемник показывал среднеправильные значения координат для данной местности.
Также из отличий можно отметить цену (многократная разница), мощность, внутреннюю начинку и размер (геодезические значительно больше).
25-09-2018
Стремительное развитие технологий позволило существенно расширить линейку геодезических приборов, которые используют специалисты в ходе изысканий. Таким оборудованием стал GPS приёмник геодезический, который позволяет получить максимально точные данные, практически без погрешностей. Кроме того, оборудование позволяет ускорить проведение изысканий, что позволяет завершить работы в сжатые сроки.
Сверхточное позиционирование на дороге
Что за GNSS?
GNSS расшифровывается как Global Navigation Satellite System (или Спутниковая Система Навигации) и используется как общий термин для спутниковой локализации с глобальным покрытием по всему земному шару. По состоянию на 2019 год, существует несколько основных спутниковых группировок:
Как это все работает?
Возьмем для примера обычный GPS в нашем телефоне. В зоне видимости с Земли всегда есть как минимум четыре GPS-спутника. Каждый из этих GPS-спутников отправляет информацию о своей позиции и текущее время на GPS-приемники с фиксированным интервалом. Ну а расстояние между GPS-приемником и спутником вычисляется путем нахождения разницы между временем отправки сигнала с GPS-спутника и временем получения сигнала GPS-приемником.







Как только приемник (например, ваш смартфон) получает сигнал хотя бы с трех спутников, вычисляется ваше местоположение (а точнее вашего телефона) с помощью трилатерации. GPS необходимо хотя бы три спутника для вычисления 2D-позиции (долгота и широта) и четыре спутника для 3D-позиции (долгота, широта, высота).
Почему GPS плохо работает в городских условиях?
И хотя под открытым небом GPS работает довольно неплохо, точность сильно падает в городских условиях (ошибка может быть 50 метров и более): высокие здания, провода, мосты и прочие объекты — все это ухудшает точность позиционирования.
Переотражение спутникового сигнала в городе. Фото Uber
Здания часто мешают прямой видимости спутников, и пока сигнал со спутника «летит» в ваш приемник, он успевает несколько раз отразиться от зданий и прийти с искажением. Из-за подобных переотражений точность позиционирования существенно снижается (бывает ± 500 метров). Вы, наверняка, сталкивались с такой ситуацией, когда при заказе такси ваше местоположение на карте отображалось неправильно.
Чтобы исключить эти проблемы, мы используем высокоточные GNSS-приемники, существенно повышающие точность позиционирования с помощью IMU (инерциальные измерительные модули), информации с CAN-шины автомобиля, RTK-поправок и еще немножко другой магии.
Повышение точности
Существует несколько основных способов повысить точность. Взглянем на самые популярные:
По большому счету, базовая станция — это GNSS-приемник в режиме “станция” + софт + радио/интернет канал
Вы знали, что в нашем OSCAR’e?
OSCAR и высокоточные GNSS-приемники
Сантиметровая точность необходима всем беспилотным автомобилям, не только OSCAR. Представьте на секунду, чтобы было бы, если бы беспилотник использовал обычный GPS с точностью ± 50 метров:
Такая низкая точность однозначно приведет к ДТП. Именно поэтому в процессе работы над OSCAR мы проводили исследования и испытывали ряд GNSS приемников, тестируя их в сложных условиях плотной городской застройки.
Автомобиль один, а GPS-треков несколько
В итоге, мы остановились на двух решениях:
В StarLine мы наслаждаемся тем, что делаем безопасный беспилотный автомобиль реальностью. Если тебе также интересна эта тема и ты хочешь строить беспилотное будущее с нами, то приглашаем в команду!
Проект StarLine OSCAR (Open Source Car) открыт для специалистов из Open Source Community, где все желающие могут поучаствовать в процессе разработки беспилотника на уровне кода, опробовать свои алгоритмы на реальном автомобиле, оснащенном дорогостоящим оборудованием.
Задача GPS измерений в геодезии
С помощью GPS решается много задач. Рассмотрим вкратце:
- в масштабах планеты GPS измерения используют еще для наблюдения за глобальными геологическими процессами. Например за движением тектонических плит. Стоя на движущейся плите, нельзя с помощью обычных приборов оценить ее движение. А с помощью спутниковых наблюдений — можно. . Это одно из основных направлений использования. Смысл заключается в том, что с помощью спутниковых приемников определяют местоположение опорных пунктов, которые, впоследствии будут использоваться в качестве исходных при строительстве или других геодезических работах. Далее в бой вступают уже тахеометры, нивелиры и некоторые другие геодезические приборы.
- GPS приемники могут использоваться и для проведения непосредственно геодезических работ. Если позволяет местность и сигнал от спутников стабильный, то можно непосредственно проводить топографические съемкиразных масштабов , выносить в натуру различные проекты минуя стадию закладки опорных пунктов.
- в кадастровых работах также часто используются GPS технологии при межевании и выносе в натуру границ земельного участка . В настоящее время подавляющее большинство кадастровых инженеров использует геодезические приемники для обеспечения определения кадастровых координат относительно пунктов геодезической государственной сети (ГГС).
Триангуляция
В основе GPS лежит идея триангуляции точки в пространстве. Чтобы было проще, начнём издалека.
Чтобы определить положение точки в пространстве, достаточно знать расстояние от неё до трёх других точек с заранее известными координатами. В геодезии и радиосвязи это называется триангуляция — когда мы по координатам трёх точек можем вычислить, где находится четвёртая (наша). В сотовых телефонах без GPS-модуля это работает так:
- Сотовый телефон ловит сигналы от трёх вышек радиосвязи.
- В этих сигналах передаются, в числе прочего, координаты самих вышек.
- Телефон замеряет время, за которое проходит сигнал до каждой вышки.
- На основе этого времени высчитывает координаты своего местоположения с точностью 10–20 метров.
Теперь, когда мы знаем основную идею, переходим к спутникам.
![]()
Виды и типы систем глобального позиционирования GPS
Производится навигационное оборудование нескольких видов:
- Приемник L1 геодезический GPS – одночастотный односистемный.
- Приемник L1+L2 геодезический GPS – двухчастотный односистемный.
- Приемник GPS/ГЛОНАСС L1+L2 – двухчастотный двухсистемный. При этом для обработки результатов, которые передает устройство, применяется особое программное обеспечение.
Для задач ГИС обычно используются GNSS оборудование, предназначение которого заключается в сборе атрибутивной, а также пространственной информации, в дальнейшем использующиеся для создания точных цифровых карт и загрузки геоинформационных систем.
Что такое GPS приёмник в геодезии?
Современный GPS-приёмник способен принимать сигналы не только GPS-спутников, но и ГЛОНАСС или её аналогов. Чем больше спутников видит приёмник, тем выше его точность.
Как работает GPS?
GPS-приёмник является очень сложным устройством, и если рассматривать принцип его работы, то можно выделить основные пункты:
- GPS-приёмник принимает сигналы от всех доступных спутников (более 20 на орбите);
- GPS-приёмник оснащён системой обработки сигналов, получая и расшифровывая точные данные времени и положения спутника, и рассчитывая расположение в пространстве;
- Имеет блок устройств, которые отображают координаты, передают их или управляют подключенными исполнительными механизмами.
Как в геодезии применяется GPS оборудование?
С помощью GNSS-приёмников проводятся топографические съёмки, создаются или реконструируются опорные и съёмочные сети, выносятся в натуру различные объекты и границы участков, производится межевание, определяются кадастровые координаты и пр.
GNSS-приёмники обеспечивают максимальную точность координат, которую невозможно достичь другими методами, устраняют зависимость проведения геодезических работ от погодных условий, видимости, растительности и расположения различных посторонних объектов, обеспечивают мобильность и высокую скорость выполнения всех процессов.
Какие спутниковые системы существуют?
● Американская система GPS
GPS (англ. Global Positioning System — система глобального позиционирования, читается Джи Пи Эс, также ГПС (глобальная позиционирующая система)) — спутниковая система навигации, обеспечивающая измерение расстояния, времени и определяющая местоположение во всемирной системе координат WGS 84. Позволяет почти при любой погоде определять местоположение в любом месте Земли (исключая приполярные области) и околоземного космического пространства. Система разработана, реализована и эксплуатируется Министерством обороны США, при этом в настоящее время доступна для использования в гражданских целях — нужен только навигатор или другой аппарат (например, смартфон) с GPS-приёмником.






Какие есть аналоги данной системы?
● Российская Система — ГЛОНАСС
ГЛОНАСС расшифровывается как Глобальная Навигационная Спутниковая Система. ГЛОНАСС начала своё существование в 1976 году, и активно развивалась на протяжении многих лет. В 2012 году поддержка и развитие системы ГЛОНАСС вышла на более высокий уровень, благодаря постановлению правительства. Как итог, на данный момент функционирует около 30 спутников системы, и ГЛОНАСС используется не только в геодезии, но и в спасательных операциях, картографии, космической навигации, сельском хозяйстве, военной отрасли, авиации, транспортной и прочей навигациях.
● Китайская Система — BeiDou
Идея создания БэйДоу появилась в 1983 году. До 2004 года проводились испытания на региональном уровне, а в 2009 году начался третий, глобальный этап развития системы BeiDou. Орбитальная группировка БэйДоу смешанная, и состоит из более чем 30 космических аппаратов, расположенных на трёх орбитах. Как и ГЛОНАСС, используется для обеспечения информации и координат в различных сферах.
● Европейская — Galileo
Европейская спутниковая система Galileo совсем недавно запустила новые космические аппараты. Два спутника Galileo были запущены на орбиту 5 декабря 2021 года, теперь суммарно насчитывается 28 навигационных спутников Галилео. От GPS системы Galileo отличается более высокой орбитой, что обеспечивает точность до 1 м на широте Полярного круга. Проект Galileo является совместной работой Евросоюза, Украины, России, Китая, Израиля, Южной Кореи и др. стран.
Грамотный выбор местоположения базового приемника
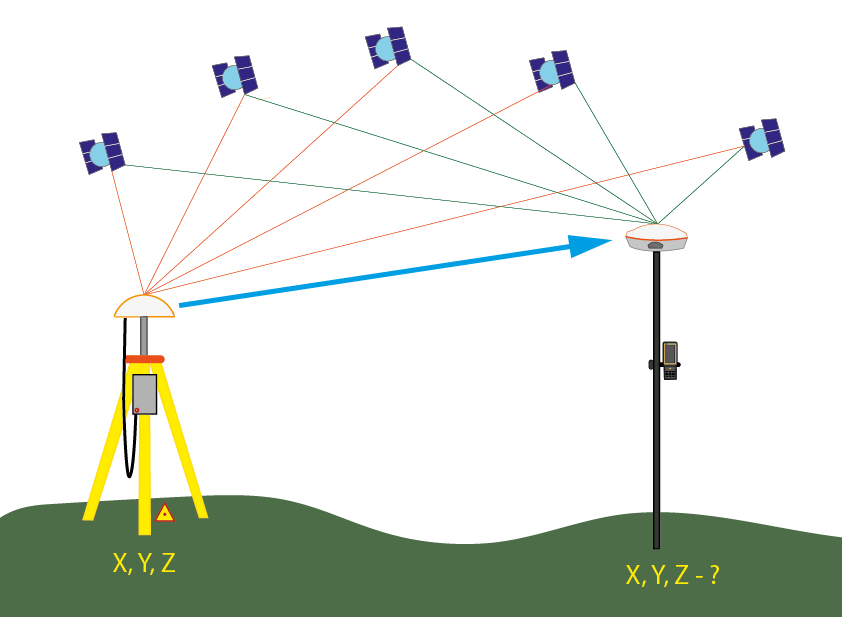
Местоположение крайне важно для проведения успешной съемки. При выполнении постобработки либо съемки в реальном времени на одно- или двухчастотный приемник нужно помнить, что положение ровера (подвижной антенны) постоянно будет отсчитываться относительно положения базы
Любая погрешность определения координат базы передвигающейся антенной неизбежно приведет к искажению координат самого ровера.
Таким образом, необходимо соблюсти два условия:
- Надежность GNSS-приема;
- Известность/неизвестность координат самой базы.
Условие №1: GNSS-прием
Необходимо удостовериться, что антенна установлена в таком месте, где не существует преград для обозрения определенного участка неба в вертикальном направлении (здесь не ведется речь о наземных экранирующих препятствиях, расположенных по горизонтали). Чистое пространство над базой позволит собирать данные от максимального количества спутников, над ней пролетающих. Подобное расположение гарантирует благоприятную работу системы в целом и получение надежных данных даже от спутников, находящихся на геостационарной орбите, не говоря уже о низколетящих.
![]()
Условие № 2: известность/неизвестность положения базы
При некоторых методах съемки вполне может статься так, что положение базы точно не известно роверу. Поэтому, необходимо принять следующие меры: в случае, если необходимо достичь сантиметровой точности измерений, то следует использовать примерные координаты в сантиметрах, которые известны для местности, где установлена базовая антенна. Если и это сделать невозможно, тогда следует заложить в сценарий измерений небольшую погрешность, которую потом можно будет устранить, узнав точные координаты базы.